

3.2 Построение желаемой лах системы
Желаемая логарифмическая амплитудная частотная характеристика формируется исходя из заданных требований к системе по точности и качеству переходного процесса. Точность задается значениями установившихся ошибок, а качество переходного процесса – величиной перерегулирования и временем регулирования.
Построение желаемой ЛАХ системы производится следующим образом:
а) Низкочастотная часть ЛАХ формируется из условия обеспечения требуемой точности системы в установившемся режиме. Низкочастотная часть желаемой ЛАХ должна иметь наклон -20дб/дек и проходить не ниже точки с координатами =1c-1 , 20log(Kобщ).
б) Среднечастотный участок желаемой ЛАХ строится из условия обеспечения основных показателей качества переходного процесса - перерегулирования и времени регулирования. Это достигается тем, что среднечастотный участок желаемой ЛАХ пересекает ось частот на частоте среза с и имеет наклон –20 дб/дек. Частоту среза с и требуемые запасы устойчивости по амплитуде Lh и фазе можно определить по номограмме Солодовникова, исходя из заданных значений tр = 0,7 с (время регулирования) и = 30 (величина перерегулирования).
Среднечастотный участок проводится с наклоном –20 дб/дек влево и вправо от частоты среза с до достижения модулей, равных Lh и -Lh. Среднечастотный участок желаемой ЛАХ сопрягается с низкочастотным участком прямой с наклоном –40 дб/дек или –60 дб/дек. Выберем наклон –60 дб/дек.
в) Высокочастотный участок желаемой ЛАХ проводится параллельно высокочастотному участку располагаемой ЛАХ, т. к. область высоких частот содержит сопрягающие частоты, которые не влияют существенно на динамику системы.
В данном курсовом проекте построение располагаемой и желаемой ЛАХ осуществлялось с помощью программы «ТАУ».
Для этого выберем передаточную функцию разомкнутой системы и во вкладке «Синтез» выберем пункт «Коррекция». Автоматически будет построена располагаемая ЛАХ системы, на рис. 3.3 она обозначена цифрой 1.
Установим сопряжение -60 дБ/дек. Программа позволяет рассчитать значения частоты среза с и требуемые запасы устойчивости по амплитуде Lh, исходя из заданных значений tр = 0,7 с и = 30 (рис. 3.2).
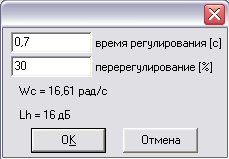
Рис. 3.2 – Окно расчета частоты среза и запаса устойчивости
Далее, исходя из рассчитанных значений для частоты среза и запаса устойчивости, в «ТАУ» можно построить желаемую ЛАХ системы (рис.3.3), она обозначена цифрой 2.
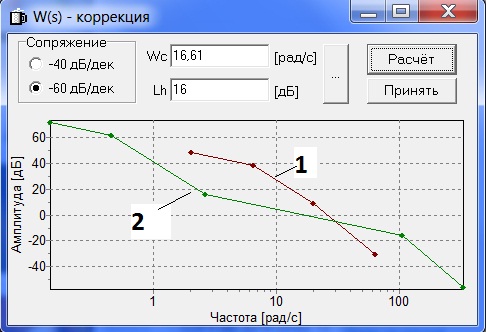
Рис. 3.3 – Располагаемая и желаемая ЛАХ системы
3.3. Определение передаточной функции корректирующего звена
Для реализации данной системы выберем последовательное корректирующее устройство. В этом случае желаемая передаточная функция разомкнутой системы имеет вид:
![]() ,
(3.1)
,
(3.1)
где
WПКУ(S) - передаточная функция последовательного корректирующего устройства;
Wр(S) - передаточная функция располагаемой системы.
Тогда логарифмическая амплитудная частотная характеристика желаемой системы
![]() (3.2)
(3.2)
Следовательно, логарифмическая амплитудная частотная характеристика последовательного корректирующего устройства
![]() (3.3)
(3.3)
Выражение (3.3) показывает, что для определения последовательного корректирующего устройства необходимо:
по располагаемой передаточной функции построить ЛАХ располагаемой системы;
по заданным показателям качества построить ЛАХ желаемой системы;
вычесть из желаемой ЛАХ располагаемую ЛАХ, что позволит найти требуемую ЛАХ последовательного корректирующего устройства;
по виду ЛАХ последовательного корректирующего устройства определить его передаточную функцию и схему.
Передаточную функцию последовательного корректирующего устройства можно получить, используя «ТАУ», для этого необходимо сначала рассчитать желаемую передаточную функцию разомкнутой системы. Во вкладке «Коррекция» после построения желаемой и располагаемой ЛАХ системы нужно нажать на кнопку «Принять», после чего программа автоматически вставит в исходный текст программы желаемую передаточную функцию разомкнутой системы:
{ Wc = 16,61 [рад/с]; Lh = 25 [дБ]; -60 дБ/дек }
{скорректированная2 желаемая разомкнутая система }
W_ok_ok _ok (s) = 549,99 *
(
(1 - 0,009 * s) *
(1,0706 * s + 1) ^ 2
) / (
s *
(6,1606 * s + 1) ^ 2 *
(0,0033856 * s + 1) ^ 3
);
Далее передаточную функцию корректирующего устройства рассчитаем следующим образом:
{последовательное корректирующее устройство}
Wpku(s) = W_ok _ok _ok (s)/W(s);
где
W(s) – располагаемая передаточная функция.
Тогда
{ Передаточная функция Wpku(s) }
Wpku(s) = 1 *
(
(1,0706 * s + 1) ^ 2 *
(0,05 * s + 1) *
(0,15492^2 * s^2 + 2 * 0,96825 * 0,15492 * s + 1)
) / (
(6,1606 * s + 1) ^ 2 *
(0,0033856 * s + 1) ^ 3
);