

4. Построение переходного процесса и анализ качества процесса регулирования
4.1. Анализ качества процесса регулирования
Для получения желаемой передаточной функции замкнутой системы воспользуемся формулой (1.7):
![]() ,
(4.1)
,
(4.1)
где
Wж(s)
- желаемая передаточная функция
разомкнутой системы, т. к. корректирующее
устройство включено последовательно,
то
![]() ;
;
Wзу(s) =Кзу - передаточная функция задающего устройства;
![]() -
передаточная функция прямой цепи;
-
передаточная функция прямой цепи;
![]() -
передаточная функция термопары;
-
передаточная функция термопары;
где:
КЗУ = 0,00005 (В/ºC);
Tт =0,05 – постоянная времени термопары.
Найдем передаточную функцию разомкнутой системы:

Тогда передаточная функция замкнутой системы:
 (4.2)
(4.2)
ТЖ1=1,0706 (с);
ТЖ2=6,1606 (с);
ТЖ3=0,0033856 (с);
Т = 0,15492 (с);
=0,96825;
Tт =0,05 (с);
550(с-1).
Передаточная функция замкнутой системы может быть получена с помощью «ТАУ»:
{скорректированная2 желаемая замкнутая система }
Fyg_ok _ok _ok (s) = Wzu(s) * (W_ok _ok _ok (s)/Wter(s) / (1 + W_ok _ok _ok (s)));
{ Передаточная функция Fyg_ok _ok _ok (s) }
Fyg_ok _ok _ok (s) = 1 *
(
(1 - 0,009 * s) *
(1,0706 * s + 1) ^ 2 *
(0,05 * s + 1)
) / (
(1,2558 * s + 1) *
(0,82253 * s + 1) *
(0,040317 * s + 1) *
(0,010794 * s + 1) *
(0,0024408^2 * s^2 + 2 * 0,936 * 0,0024408 * s + 1)
);
Для построения переходного процесса воспользуемся программой «ТАУ» и уже имеющейся желаемой передаточной функцией замкнутой системы.
График переходного процесса представлен на рис. 4.1.
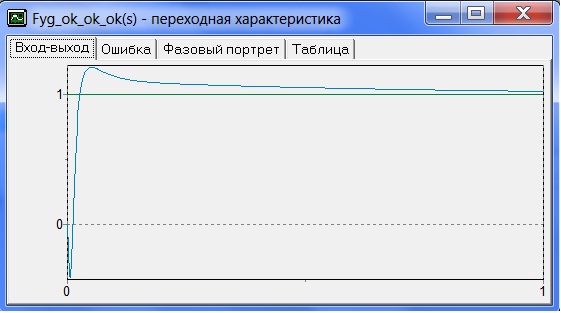
Рис 4.1 – График переходного процесса
Время регулирования = 0,536
Перерегулирование = 20,8%
Оценим запасы устойчивости системы с помощью программы «ТАУ». Рассмотрим таблицу 4.1, данные которой получены, исходя из ЛАФЧХ.
Таблица 4.1
Запасы устойчивости
ω [рад/с] |
L [дБ] |
φ [гр.] |
16,53 |
0,00 |
-113,00 |
86,73 |
-15,00 |
-180,0 |
Таким образом, запас устойчивости по амплитуде составляет h=15 дб, по фазе =67,0 градусов.
Получившиеся показатели качества переходного процесса меньше требуемых, следовательно корректирующее устройство реализовано верно.
Снимем амплитудную (рис 4.2) и фазовую (рис 4.3) характеристики получившегося корректирующего устройства.
{ Передаточная функция Wpku(s) }
Wpku(s) = 1 *
(
(1,0706 * s + 1) ^ 2 *
(0,05 * s + 1) *
(0,15492^2 * s^2 + 2 * 0,96825 * 0,15492 * s + 1)
) / (
(6,1606 * s + 1) ^ 2 *
(0,0033856 * s + 1) ^ 3
);
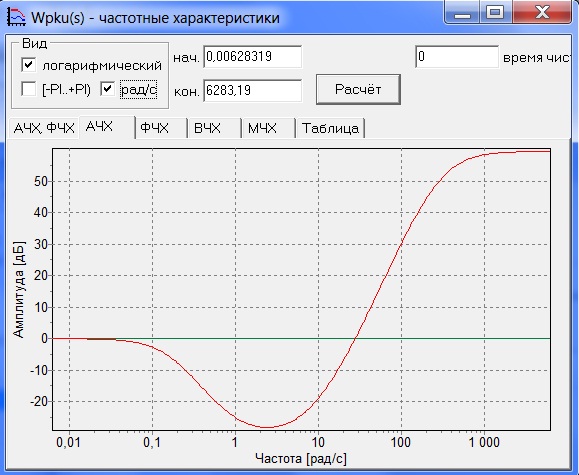
Рис 4.2 Амплитудная характеристика корректирующего устройства
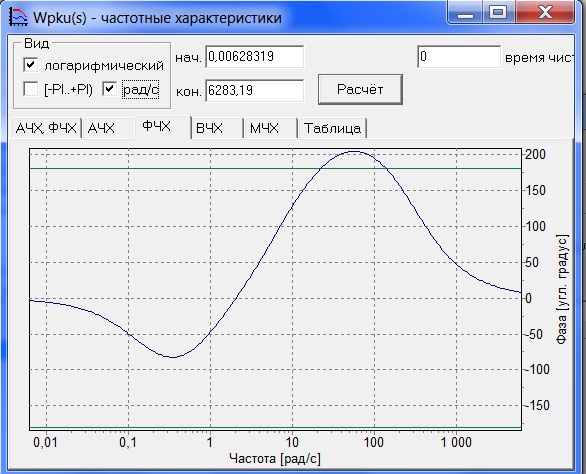
Рис 4.3 Фазовая характеристика корректирующего устройства
На основании полученных характеристик и будет реализовано корректирующее устройство.
5.Схемная реализация корректирующего устройства
5.1 Аппаратная реализация
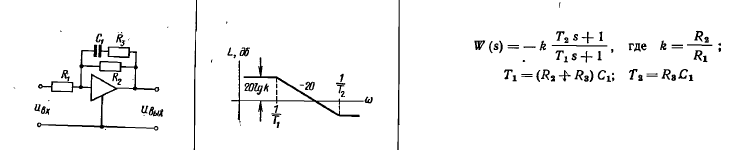
Передаточная функция последовательного корректирующего устройства имеет следующий вид:
 ,
(5.1)
,
(5.1)
где
ТЖ1=1,0706 (с);
ТЖ2=6,1606 (с);
ТЖ3=0,0033856 (с);
Т = 0,15492 (с);
=0,96825;
Tт =0,05 (с);
Таким образом, последовательное корректирующее устройство может быть технически реализовано в виде комбинации из пяти последовательно соединенных звеньев.
Глядя на передаточную функцию корректирующего устройства можно подобрать типовые звенья, составленные из реальных технических устройств, реализующие при последовательном включении необходимую функцию передачи.
Wpku(s) = 1 *
(
(1,0706 * s + 1) ^ 2 *
(0,05 * s + 1) *
(0,15492^2 * s^2 + 2 * 0,96825 * 0,15492 * s + 1)
) / (
(6,1606 * s + 1) ^ 2 *
(0,0033856 * s + 1) ^ 3
);
Для получения принципиальной схемы устройства в меню нужно выбрать вкладку «Синтез», а затем пункт «Схемная реализация». Программа «ТАУ» имеет набор элементарных электрических схем с заданными передаточными функциями. Задача пользователя сводится лишь к выбору того или иного типового звена.
Для расчетов параметров звена необходимо выбрать номинал конденсатора С1. Пусть ёмкость С1 составляет 10 мкФ. Тогда, имея значения постоянных времени звена, остальные параметры программа «ТАУ» рассчитает автоматически.
В программе ТАУ получим автоматически приблизительные параметры сопротивлений и емкостей, выбрав постоянные времени из Wpku(s):
Для первого звена
Tн= 1,0706; Тп=6,1606;
Подберём сопротивления, близкие к полученным в соответствии с рядом:
R1 = R2 =510 кОм;
С1=10 мкФ;
R3 = 110 кОм.
Тогда постоянные времени примут значения:
![]()
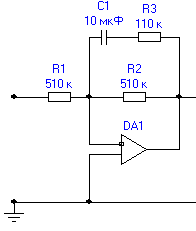
Рис 5.1 - Схема первого реализованного звена
Для проверки рассчитаем в ручную путем решения системы уравнений, описывающей цепь [4]

Для второго звена
Tн= 1,0706; Тп=6,1606;
Подберём сопротивления, близкие к полученным, в соответствии с рядом:
R1 = R2 =510 кОм;
С1=10 мкФ;
R3 = 110 кОм.
Тогда постоянные времени примут значения:
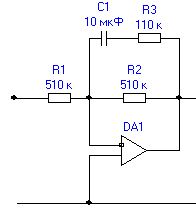
Рис 5.2 - Схема второго реализованного звена
Для третьего звена
Тн=0,05; Tп=0,0033856;
Подберём сопротивления, близкие к полученным в соответствии с рядом:
R1 = R2 =470 кОм;
С= 100 нФ;
R3 = 33 кОм.
Тогда постоянные времени примут значения:
![]()
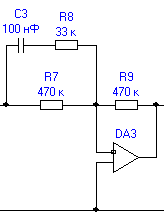
Рис 5.3 - Схема третьего реализованного звена
Для четвертого звена
Тн=0,15492; Tп=0,0033856;
Подберём сопротивления, близкие к полученным в соответствии с рядом:
R1 = R2 =1,2 МОм;
С= 10 нФ;
R3 = 330 кОм.
Тогда постоянные времени примут значения:
![]()
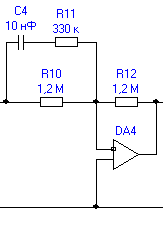
Рис 5.4 - Схема четвертого реализованного звена
Для пятого звена
Тн=0,15492; Tп=0,0033856;
Подберём сопротивления, близкие к полученным в соответствии с рядом:
R1 = R2 =1,2 МОм;
С= 10 нФ;
R3 = 330 кОм.
Тогда постоянные времени примут значения:

Рис 5.5 - Схема пятого реализованного звена
Для шестого звена
Подберём одинаковые сопротивления в соответствии с рядом:
R1 = R2 =510 кОм;
Для правильной реализации необходимо еще инвертировать знак функции.
Данное звено представляет собой инвертор знака с коэффициентом K= -1
Рис 5.6 - Схема шестого реализованного звена
Полная принципиальная схема устройства представлена приложении Б.
После того как все звенья соединены, в программе «ТАУ» необходимо выбрать пункт «Составить описание». Программа автоматически произведет расчет передаточной функции полученного устройства:
{ реальное корректирующее устройство }
Circuit(s) = 1 *
(
(1,1 * s + 1) ^ 2 *
(0,0503 * s + 1) *
(0,1533 * s + 1) ^ 2
) / (
(6,2 * s + 1) ^ 2 *
(0,0033 * s + 1) ^ 3
);
Тогда реальная система рассчитается следующим образом
{реальная разомкнутая система}
WW(s)=W(s)*Circuit(s);
{реальная замкнутая система }
FF(s) = Wzu(s) * (WW(s)/Wter(s) / (1 + WW(s)));
{ Передаточная функция FF(s) }
FF(s) = 1 *
(
(1 - 0,009 * s) *
(1,1 * s + 1) ^ 2 *
(0,0503 * s + 1) *
(0,1533 * s + 1) ^ 2 *
(0,05 * s + 1)
) / (
(1,2843 * s + 1) *
(0,85458 * s + 1) *
(0,18607 * s + 1) *
(0,11696 * s + 1) *
(0,053097 * s + 1) *
(0,039668 * s + 1) *
(0,010628 * s + 1) *
(0,0023743^2 * s^2 + 2 * 0,93535 * 0,0023743 * s + 1)
);
А теперь сравним ЛЧХ полученного устройства с ЛЧХ требуемого ПКУ. Эти ЛЧХ представлены на рис.5.7 и 5.8 соответственно.
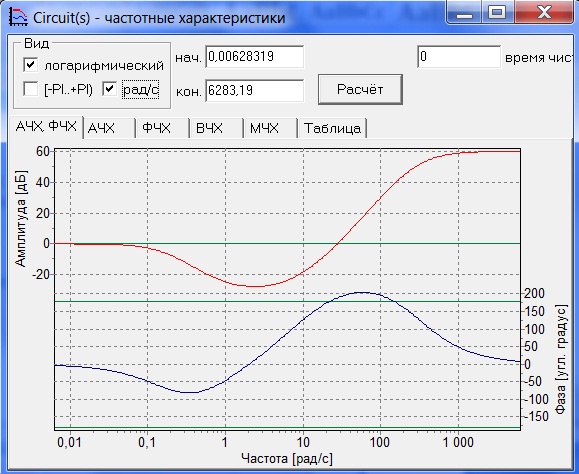
Рис. 5.7 – ЛЧХ ПКУ, полученного в ходе аппаратной реализации
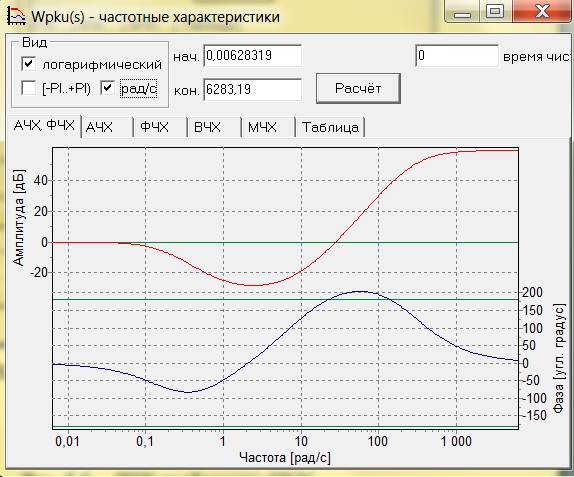
Рис. 5.8 – ЛЧХ требуемого ПКУ
Для того чтобы убедиться в работоспособности введенного устройства, построим частотные характеристики реальной замкнутой системы. Также выполним анализ качества процесса регулирования системой.
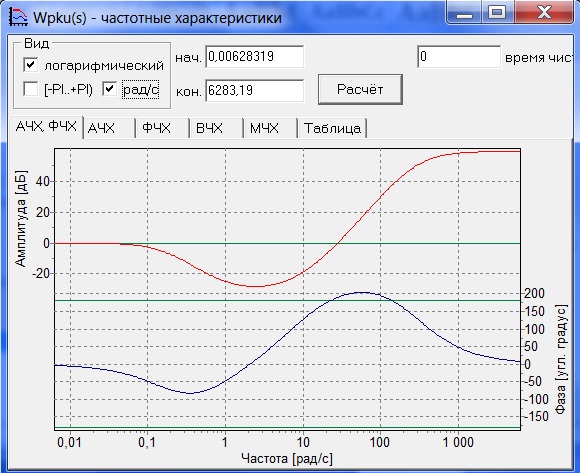
Рис. 5.9 – Переходная характеристика реальной замкнутой системы
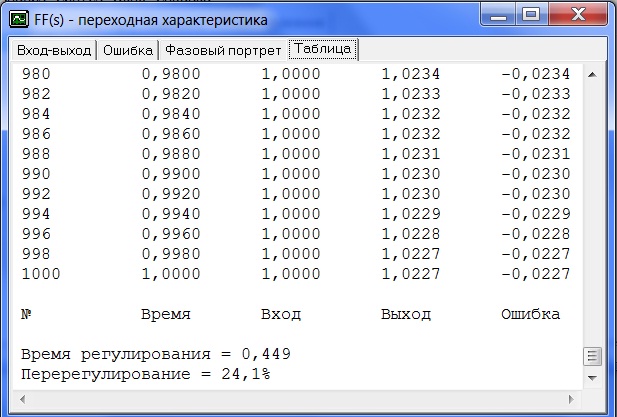
Рис. 5.10 – Оценка качества процесса регулирования реальной замкнутой системой
Как видно из рисунка 5.10, величина перерегулирования равна 24,1 %, время регулирования составляет 0,449 с. Полученные значения удовлетворяют предъявленным требованиям (перерегулирование не больше 30%, время регулирования не больше 0,7 с), значит, аппаратная реализация последовательного корректирующего устройства выполнена верно.