

2.3.1. Пример

(В
момент
![]() точка проходит через положение
точка проходит через положение![]() влево со скоростью
влево со скоростью![]() .
Нужно остановить ее в положении
.
Нужно остановить ее в положении![]() ).
).
Пусть
![]() .
Решаем систему
.
Решаем систему
 (5)
(5)
Это
– семейство парабол
 .
.
Пусть
![]() ,
,
 (6)
(6)
|
Линия переключения
Находим
закон движения из точки
|
|
 .
.
полагая
![]() ,
находим
,
находим
 ;
;
Закон движения
 .
(7)
.
(7)
Это
движение происходит по параболе
 .
Найдем точку
.
Найдем точку![]() пересечения с линией переключения.
Пересечение происходит при
пересечения с линией переключения.
Пересечение происходит при![]() .
.
Поэтому
решаем систему уравнений

![]() .
.
Находим
момент
![]() попадания в эту точку
попадания в эту точку![]() ,
используя закон движения (7):
,
используя закон движения (7): .
.
Находим
закон движения из точки
![]() с момента
с момента![]() по линии переключения, полагая в (5)
по линии переключения, полагая в (5)![]() :
:![]() :
:
 .
Закон движения
.
Закон движения
 .
.
Наконец,
находим момент
![]() попадания в начало координат
попадания в начало координат![]() :
:
 .
.
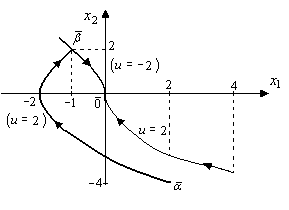
Итак, оптимальная траектория
|
Оптимальное уравнение
|
|
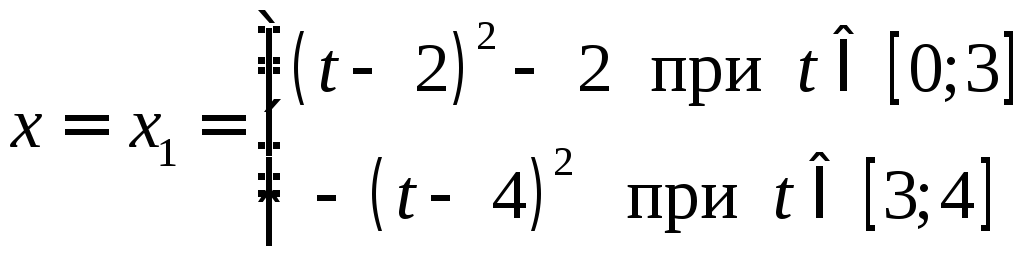 .
. .
.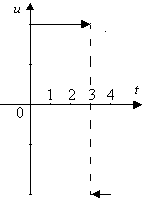
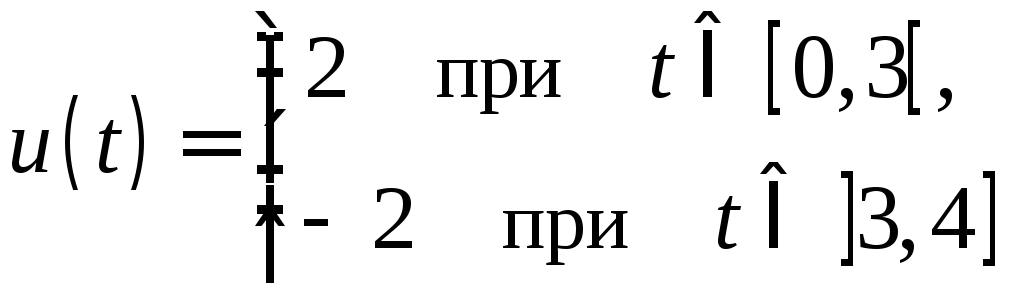
Судя по изображенной фазовой траектории, управление движением происходило так:
В
момент
![]() точка проходила положение
точка проходила положение![]() со скоростью
со скоростью![]() двигаясь влево. Чтобы остановить ее,
включили двигатель на полную мощность
двигаясь влево. Чтобы остановить ее,
включили двигатель на полную мощность![]() (по оси
(по оси![]() ).
Точка остановилась в положении
).
Точка остановилась в положении![]() с нулевой скоростью. Под тем же управлением
с нулевой скоростью. Под тем же управлением![]() точка двигалась до положения
точка двигалась до положения![]() ,
где имела уже положительную скорость
,
где имела уже положительную скорость![]() к
моменту
к
моменту![]() В этот момент, чтобы точка, набирая
положительную скорость, не перескочила
начало координат, управление переключили
на
В этот момент, чтобы точка, набирая
положительную скорость, не перескочила
начало координат, управление переключили
на![]() .
Это управление затормозило точку и к
моменту
.
Это управление затормозило точку и к
моменту![]() остановило ее в начале координат.
остановило ее в начале координат.
2.3.2. Пример.
Положим
в примере 2.3.1
![]() Тогда точка
Тогда точка![]() находится на линии переключения. Закон
движения из этой
находится на линии переключения. Закон
движения из этой
точки
с момента
![]()

Находим
момент
![]() попадания в точку
попадания в точку![]()
 Оптимальная траектория
Оптимальная траектория![]() .
Оптимальное управление
.
Оптимальное управление![]() .
.
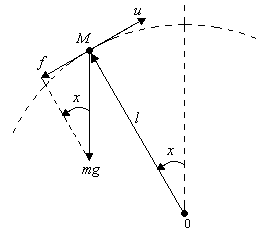
Задача
2. Математический
маятник – груз
![]() малых размеров с массой
малых размеров с массой![]() на невесомом стержне
на невесомом стержне![]() длиной
длиной![]() находится вблизи верхнего (неустойчивого)
положения равновесия. Требуется под
действием ограниченной по величине
силы, направленной перпендикулярно к
оси маятника, за кратчайшее время
привести маятник к положению равновесия
с нулевой скоростью (трением пренебрегаем).
находится вблизи верхнего (неустойчивого)
положения равновесия. Требуется под
действием ограниченной по величине
силы, направленной перпендикулярно к
оси маятника, за кратчайшее время
привести маятник к положению равновесия
с нулевой скоростью (трением пренебрегаем).
Обозначим
![]() угол отклонения маятника от положения
равновесия в момент времени
угол отклонения маятника от положения
равновесия в момент времени![]() ,
отсчитываемый в направлении против
часовой стрелки.
,
отсчитываемый в направлении против
часовой стрелки.
|
|
Управление
движением начинается в момент времени
|
Управлением
является сила
![]()
![]() ,
крайние значения
,
крайние значения![]() и
и![]() означают включение двигателя на полную
мощность в положительном и отрицательном
направлении отклонения соответственно.
означают включение двигателя на полную
мощность в положительном и отрицательном
направлении отклонения соответственно.
Составим
уравнение движения маятника. Движение
маятника по окружности происходит под
действием силы
![]() (составляющая силы тяжести в направлении
касательной) и управления
(составляющая силы тяжести в направлении
касательной) и управления![]() с линейным ускорением
с линейным ускорением![]() .
По второму закону Ньютона
.
По второму закону Ньютона
![]()
Это
– нелинейное (из-за
![]() )
дифференциальное уравнение второго
порядка с неизвестной функцией
)
дифференциальное уравнение второго
порядка с неизвестной функцией![]() .
Ограничиваясь положениями маятника,
достаточно близкими к положению
равновесия, мы можем заменить
.
Ограничиваясь положениями маятника,
достаточно близкими к положению
равновесия, мы можем заменить![]() на
на![]() (так как
(так как![]() при малых
при малых![]() ).
Получим линейное дифференциальное
уравнение второго порядка
).
Получим линейное дифференциальное
уравнение второго порядка
 .
.
Для
упрощения вычислений будем считать,
что
![]() .
.
Как
и в задаче 1, перейдем к нормальной
системе заменой
![]() .
Получим линейную стационарную задачу
оптимального быстродействия
.
Получим линейную стационарную задачу
оптимального быстродействия
 (1)
(1)
или

где
 .
.
Кроме
ограничения на управление
![]() ,
в этой задаче имеется фазовое ограничение
,
в этой задаче имеется фазовое ограничение![]() ,
где
,
где![]() некоторое множество на фазовой плоскости
некоторое множество на фазовой плоскости![]() .
(например, первая координата
.
(например, первая координата![]() ограничена некоторым отрезком
ограничена некоторым отрезком![]() ,
в пределах которого считаем
,
в пределах которого считаем![]() ).
).
Пользуясь критерием Калмана, проверим управляемость задачи (1) (в пределах фазового ограничения):
 задача
управляема.
задача
управляема.
Нахождение оптимального управления и оптимальных траекторий без краевых условий. Линия переключения.