2.3. Примеры синтеза оптимального управления
Задача
1. Пусть
материальная точка с массой
![]() движется по инерции вдоль прямой. Нужно
быстрейшим образом остановить движение
этой точки в заданном месте, которое мы
примем за начало координат, с помощью
ограниченной по величине силы.
движется по инерции вдоль прямой. Нужно
быстрейшим образом остановить движение
этой точки в заданном месте, которое мы
примем за начало координат, с помощью
ограниченной по величине силы.

Пусть
![]() координата
точки в момент времени
координата
точки в момент времени![]() .
Управление движением начинается в
момент времени
.
Управление движением начинается в
момент времени![]() в точке
в точке![]() со скоростью
со скоростью![]() и должно закончиться за наименьшее
время
и должно закончиться за наименьшее
время![]() в точке
в точке![]() со скоростью
со скоростью![]() .
Управлением
.
Управлением![]() является сила, ограниченная по величине:
является сила, ограниченная по величине:![]() ,
так что область управления
,
так что область управления![]() .
Крайние значения
.
Крайние значения![]() и
и![]() означают включение двигателя на полную
мощность в отрицательном и положительном
направлениях оси
означают включение двигателя на полную
мощность в отрицательном и положительном
направлениях оси![]() соответственно. При движении в
положительном направлении оси
соответственно. При движении в
положительном направлении оси![]() скорость положительна:
скорость положительна:![]() ,
а при движении в отрицательном направлении-
отрицательна:
,
а при движении в отрицательном направлении-
отрицательна:![]() .
.
Для
простоты вычислений будем считать, что
масса
![]() ед.
ед.
Ускорение
движения
![]() создается управлением (силой)
создается управлением (силой)![]() ,
и по второму закону Ньютона имеем
уравнение движения
,
и по второму закону Ньютона имеем
уравнение движения
![]() (1)
(1)
с
краевыми условиями

Сведение задачи 1 к нормальной линейной системе
дифференциальных уравнений. Проверка управляемости.
Введем
новые неизвестные функции
![]() и
и![]() :
:![]() ,
,![]() .
Тогда уравнение движения (1) (уравнение
2-го порядка) сведется к нормальной
линейной системе двух дифференциальных
уравнений
.
Тогда уравнение движения (1) (уравнение
2-го порядка) сведется к нормальной
линейной системе двух дифференциальных
уравнений

с
краевыми условиями
![]() .
.
Так
как
 ,
то
,
то ,
,
а
так как
 то
то (
(![]() скалярная
функция:
скалярная
функция:![]() ).
).
Таким образом, имеем стационарную линейную задачу оптимального быстродействия

![]() (2)
(2)
Фазовое
ограничение отсутствует: допустимые
фазовые состояния
![]() заполняют всю плоскость:
заполняют всю плоскость:![]() На фазовой плоскости первая координата
На фазовой плоскости первая координата![]() точки
точки![]() означает координату движущейся точки
на оси
означает координату движущейся точки
на оси![]() ,
вторая координата
,
вторая координата![]() скорость
точки.
скорость
точки.
По
критерию Калмана 8.1 проверим управляемость
задачи (2) (здесь
![]() ):
):


 ,
задача управляема.
,
задача управляема.
Нахождение оптимального управления и оптимальных
траекторий без краевых условий. Линия переключения.
Составим сопряженную систему
 .
.
Ее
общее решение
 т.е.
т.е. ,
где
,
где произвольный
постоянный вектор.
произвольный
постоянный вектор.
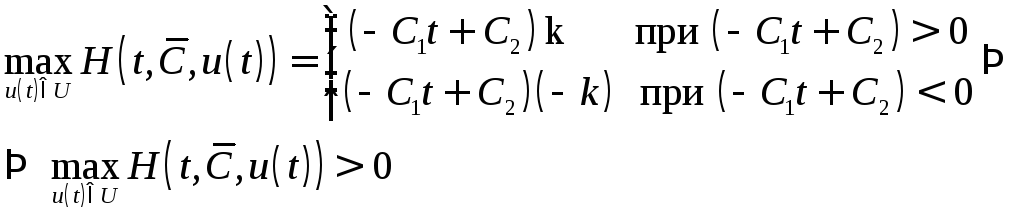
Составим функцию Понтрягина:
 .
.
Пусть
![]() фиксировано. Если
фиксировано. Если![]() ,
то среди всех допустимых значений
,
то среди всех допустимых значений![]() максимальное значение функции Понтрягина
доставляет знчение
максимальное значение функции Понтрягина
доставляет знчение![]() .
Если
.
Если![]() ,
то функция
,
то функция![]() получает максимальное значение при
получает максимальное значение при![]() .
Таким образом, при всех
.
Таким образом, при всех![]() (за исключением значения
(за исключением значения![]() ,
при котором
,
при котором![]() )
функция управления
)
функция управления![]() ,
доставляющая максимум функции Понтрягина,
принимает только два значения
,
доставляющая максимум функции Понтрягина,
принимает только два значения![]() и
и![]() .
.
Отметим,
что условие 2 принципа Понтрягина при
таком выборе значений
![]() автоматически выполняется:
автоматически выполняется:
(за
исключением одного значения
![]() ,
при котором
,
при котором![]() ).
).
Согласно
принципу максимума Понтрягина, оптимальные
траектории можно получить только при
значениях
![]() .
.
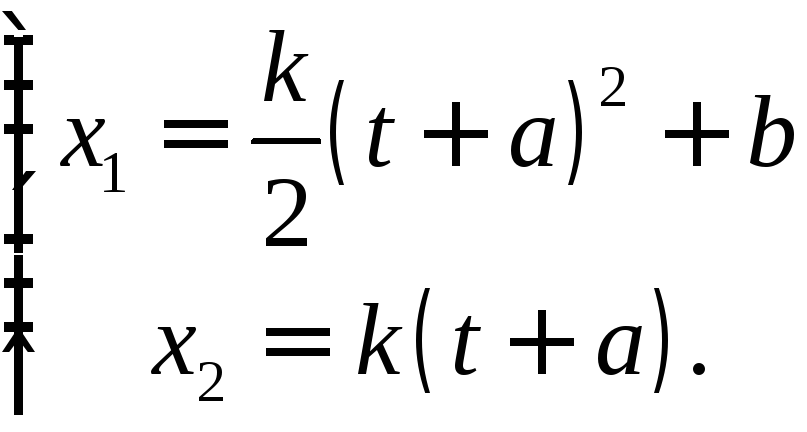
Пусть
![]() .
Тогда система (2) имеет вид
.
Тогда система (2) имеет вид .
.
Ее общее решение
 (3)
(3)
где
![]() произвольные
постоянные (их обозначили
произвольные
постоянные (их обозначили![]() в отличие от постоянных
в отличие от постоянных![]() и
и![]() в решении сопряженной системы. Кроме
того, вместо
в решении сопряженной системы. Кроме
того, вместо![]() записали
записали![]() ,
так как
,
так как![]() тоже произвольная постоянная, как и
тоже произвольная постоянная, как и![]() ).
Это – семейство оптимальных фазовых
траекторий под управлением
).
Это – семейство оптимальных фазовых
траекторий под управлением![]() .
Исключая время
.
Исключая время![]() ,
получим
,
получим семейство парабол.
семейство парабол.
|
Из
уравнения
|
|

Пусть
![]() .
Тогда система (2) имеет вид
.
Тогда система (2) имеет вид .
Её общее решение:
.
Её общее решение:
 (4)
(4)
Это
– семейство оптимальных фазовых
траекторий под управлением
![]() .
Исключая
.
Исключая![]() ,
получаем
,
получаем семейство парабол.
семейство парабол.
|
Из
уравнения
|
|

Семейства оптимальных траекторий (3) и (4) получены без учета краевых условий. Пока о роли этих семейств можно сказать следующее:
Если
точки
![]() и
и![]() лежат на одной из парабол, то именно
кусок этой параболы, соединяющий точки
лежат на одной из парабол, то именно
кусок этой параболы, соединяющий точки![]() и
и![]() ,
является оптимальной траекторией (при
совпадении направления): объект перейдет
из фазового состояния
,
является оптимальной траекторией (при
совпадении направления): объект перейдет
из фазового состояния![]() в фазовое состояние
в фазовое состояние![]() за кратчайшее время именно по этой
траектории.
за кратчайшее время именно по этой
траектории.
|
Движение
фазовой точки
|
|


по
нижней части параболы семейства (4) при
![]() :
:
 .
.
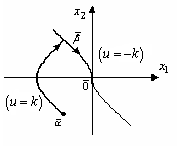
Линия
 ,
составленная из кусков парабол семейств
(3) и (4), входящих в начало координат,
называетсялинией
переключения.
,
составленная из кусков парабол семейств
(3) и (4), входящих в начало координат,
называетсялинией
переключения.
Синтез оптимальной траектории.
|
|
Пусть
точка
|

Поэтому
надо начать движение по параболе
семейства (3), которая проходит через
точку![]() в момент
в момент![]() .
.
В
некоторый момент
![]() попадем в точку
попадем в точку![]() ,
где эта парабола пересекается с линией
переключения. Затем, двигаясь с момента
,
где эта парабола пересекается с линией
переключения. Затем, двигаясь с момента![]() из точки
из точки![]() по линии переключения, в момент
по линии переключения, в момент![]() попадем в точку
попадем в точку![]() .
Полученная траектория и будет оптимальной.
В самом деле, проверим выполнение теоремы
2.2.4. При
.
Полученная траектория и будет оптимальной.
В самом деле, проверим выполнение теоремы
2.2.4. При![]() ,
т.е.
,
т.е.![]() ,
выбрано управление
,
выбрано управление![]() ,
а при
,
а при![]() ,
т.е.
,
т.е.![]() ,
выбрано управле-
,
выбрано управле-
ние
![]() .
Значит, на отрезке
.
Значит, на отрезке![]() при постоянном векторе
при постоянном векторе![]() значения
значения![]() выбраны так, что при каждом фиксированном
выбраны так, что при каждом фиксированном![]() ,
кроме
,
кроме![]() ,
,
значение функции Понтрягина
![]()
 максимальное
среди значений, принимаемых этой функцией
при всех
максимальное
среди значений, принимаемых этой функцией
при всех
![]() .
.
 выполняется
автоматически, как отмечалось раньше.
выполняется
автоматически, как отмечалось раньше.
Условия
теоремы 2.2.4 выполнены. Поэтому, согласно
принципу максимума Понтрягина, построенная
траектория является оптимальной в
смысле быстродействия, а соответствующее
управление
 является
оптимальным.
является
оптимальным.
|
|
Аналогично
строится оптимальное управление и
оптимальная траектория в случае, когда
точка
|