

27 Машина для нарезки кюветов
Машина предназначена для: очистки и расширения кюветов; нарезки новых кюветов; оправки обочин и откосов земляного полотна; изготовления поперечных траншей в рабочей зоне ротора; нарезки продольных траншей глубиной до двух метров от УГР, как за торцами шпал, так и на вылете 7,8 м от оси пути; профилирования балластной призмы; транспортировки вырезанного материала в транспортное средство или на откос земляного полотна.
Машина смонтирована на раме (платформе) 9 которая с двумя двухосными ходовыми тележками модели 18-100, кабиной 2 и обустройствами составляют экипажную часть. Основным рабочим органом является роторное устройство 3, установленное на стреле 4, которая установлена на опорно-поворотном механизме 7, на раме машины. Машина снабжена конвейером стрелы 8 и поворотным конвейером, которым роторное устройство и стрела имеют механизмы поворота 7. Машина оснащена крыльями (плугами) 10. Механизмом поворота ротора. Последний устанавливается в положение, обеспечивающее заданный профиль резания 4 механизмом подъема (опускания) стрелы устанавливается заданная глубина резания. Ротор производит вырезку материала и подает его на конвейер стрелы 8, который передает вырезанный материал на поворотный конвейер 5, а тот производит его погрузку в состав для засорителей, сцепленный с машиной со стороны поворотного конвейера, или в состав думпкаров, стоящих на соседнем пути, или производится выгрузка на сторону (на откос земляного полотна). Крыльями 10 осуществляется отделка откоса балластной призмы и бровки сливной призмы земляного полотна или междупутья.

Рис. Общий вид машины МНК-1:
1— стойка; 2 — кабина;; 3 — ротор; 4 — стрела; 5 — поворотный конвейер: 6 — тележка; 7 — опорно-поворотное устройство; 8 — основной конвейер; 9 — рама; 10 — плуг; 11 — цилиндр управления плугом
28 Машины для балластировки и подъемки пути. Назначение и классификация


29 Электробалластеры. Назначение, классификация и конструкция.
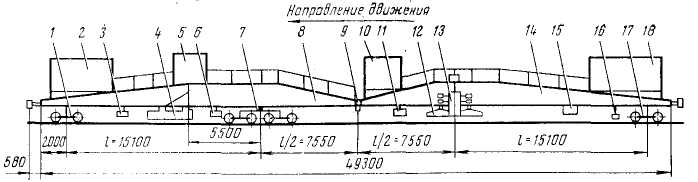
Электробалластеры предназначены для механизации работ поподъем-ке пути с подведением балласта под шпалы вывешенной путевой решетки. По конструктивным схемам электробалластеры делятся на три типа: двухпролетные с междуферменным шарниром (ЭЛБ-1, ЭЛГ5-3, ЭЛБ-ЗМ и ЭЛБ-ЗТС), консольные (КБ-2), прицепные однопролетные путеподъемники (ЭМПП-2М, МПП-5). Двухпролетные электробалластеры как наиболее совершенные и высокопроизводительные применяют на эксплуатируемых железных дорогах при капитальном ремонте и реконструкции пути, на строительстве новых железных дорог и вторых путей с большим объемом работ. Электробалластеры ЭЛБ-ЗМ и ЭЛБ-ЗТС (рис. 1) предназначены для работы на пути с тяжелыми рельсами Р65 и Р75 с деревянными и железобетонными шпалами. Они состоят из двух ферм: рабочей 14 и направляющей 8. Фермы соединены междуферменным шарниром 9, опираются на тележки 1, 7, 17. На рабочей ферме расположены рабочие органы: механизм подъема, сдвига и перекоса пути 12, балластерная рама 13, шпальные щетки 11, шпально-рельсовые щетки 16, центральный пульт управления 10, хозяйственная будка 18 и компрессор 15 (на ЭЛБ-ЗТС); на направляющей ферме – дозатор 4, пульт управления 5, рельсовые щетки 3 и 6, будка 2 с установленной в ней электростанцией. Ранее выпускавшиеся электробалластеры ЭЛБ-1 имеют такую же конструктивную схему и предназначены для работы на пути с рельсами Р43 и Р50 с деревянными шпалами.
Сопротивление движению машины: Wмаш=Wдоз+Wш.р.щ.+Wриз+Wб.пов.≤Рсц; где Wдоз – сила сопротивления действующая на дозатор; Wш.р.щ – соп. движению шпально-рельсовой решетки; Wриз – соп. движению рельсовой щетки; Wб.пов – соп. движению балластера как повозки. Суммарное сопротивление при подъемке пути: Wмаш=Wм.под+Wб.р.+Wб.под; Wм.под=2βРприт/Dр(μ1+fd/2); где β – к. увеличения сопротивления; Рприт – остаточное усилие притяжение рельсов электромагнитами; Dр – диаметр ролика; μ1 – к. трения качения о рельс ролика электромагнита; f – к. тр. к. шарикоподшипников; d – диаметр цапфы ролика.
Расчёт механизма подъёма и сдвига путевой решётки. Определение силы подъема (Н): Р=4,44√(EJxhq3); где E – модуль упругости рельсовой стали; Jx – момент инерции 2-х рельсов (гориз.); h – наибольшая высота подъема путевой решетки; q – погонное сопротивл. подъему путевой решетки. Сила сдвига: Q=192YMAXEJyKж/l3; где Kж – к. жесткости; l – длина искривленного участка.