

29)Определение ускорения точки
Проекции ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени:
ax = dvx / dt = d2x / dt2; ay = dvy / dt = d2y / dt2; az = dvz / dt = d2z / dt2;
или
ax
=
![]() x=
x=
![]() ;
ay
=
y=
;
ay
=
y=
![]() ;
az
=
z=
;
az
=
z=
![]() ;
;
Модуль и направляющие косинусы вектора ускорения a выражаются через его проекции по следующим формулам:
a =( va2 + ay2 + az2) ; cos(a,Ox) = ax / a; cos(a,Oy) = ay / a; cos(a,Oz) = az / a.
29) Вектор ускорения
a точки лежит в соприкасающейся
плоскости P![]() n и определяется двумя проекциями
n и определяется двумя проекциями
![]() и
an (ab = 0):
и
an (ab = 0):
проекция ускорения точки на касательную равна первой производной от алгебраической скорости или второй производной от криволинейной координаты точки по времени:
=
d![]() / dt
= d2s
/dt2или
=
/ dt
= d2s
/dt2или
=
![]() =
=
![]() .
.
проекция ускорения на главную нормаль равна квадрату скорости, деленному на радиус кривизны траектории в данной точке кривой:
an
= v2
/
![]() .
.
Величины и an соответственно называют касательным и нормальным ускорениями точки.
30. определение скорости и ускорения точки при координатном задания её движения.
Определение ускорения при координатном способе задания движения
Вектор
ускорения точки ![]() в
проекции на оси получаем:
в
проекции на оси получаем:
![]() ,
, ![]() ,
, ![]()
или
![]() ,
, ![]() ,
, ![]() ,
,
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул
![]() ;
;
![]() ,
, ![]() ,
, ![]() ,
,
где ![]() ,
, ![]() ,
, ![]() -
углы, образуемые вектором ускорения с
координатными осями.
-
углы, образуемые вектором ускорения с
координатными осями.
Определение скорости точки при координатном способе задания движения
Вектор
скорости точки ![]() ,
учитывая, что
,
учитывая, что ![]() ,
, ![]() ,
, ![]() , найдем:
, найдем:
![]() ,
, ![]() ,
, ![]() .
.
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени.
Зная
проекции скорости, найдем ее модуль и
направление (т.е. углы ![]() ,
, ![]() ,
, ![]() ,
которые вектор
,
которые вектор ![]() образует
с координатными осями) по формулам
образует
с координатными осями) по формулам
![]() ;
;
![]() ,
, ![]() ,
, ![]() .
.
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени.
Направлен вектор скорости по касательной к траектории, которая нам наперед известна.
31.Равномерное и равнопеременное движения точки.
Равноме́рное
движе́ние — механическое
движение,
при котором тело за любые равные отрезки
времени проходит равные перемещения.
Равномерное движение материальной
точки —
это движение, при котором скорость точки
остаётся неизменной. Перемещение,
пройденное точкой за время ![]() ,
задаётся в этом случае формулой
,
задаётся в этом случае формулой ![]() .
.
Прямолинейное равномерное движение — это движение, при котором тело (точка) за любые равные и бесконечно малые промежутки времени проходит одинаковые перемещения. Вектор скорости точки остаётся неизменным, а её перемещение есть произведение вектора скорости на время:
.
Если
направить координатную ось вдоль прямой,
по которой движется точка, то зависимость
координаты ![]() точки
от времени является линейной:
точки
от времени является линейной:
![]() ,
,
где ![]() —
начальная координата точки,
—
начальная координата точки, ![]() —
проекция вектора скорости на координатную
ось.
—
проекция вектора скорости на координатную
ось.
Точка, рассматриваемая в инерциальной системе отсчёта, находится в состоянии равномерного прямолинейного движения, если векторная сумма всех сил, приложенных к точке, равна нулю.
Если вектор at=const (касательное ускорение постоянно как по модулю, так и по направлению), то an=0. Такое движение называется равнопеременным и прямолинейным.
Если же постоянным остается только числовое значение касательного уравнения at = dv/dt = f'(t) = const, то an≠0 и такое движение точки называется равнопеременным криволинейным.
При |at|>0 движение точки называется равноускоренным, а при |at|<0 –равнозамедленным.
Уравнение равнопеременного движения независимо от его траектории имеет вид (1)s = s0 + v0t + att2 / 2.
Здесь s0 – расстояние точки от исходного положения в момент начала отсчета; v0 – начальная скорость и at – касательное ускорение – величины численно постоянные, a s и t – переменные.
Числовое значение скорости точки в любой момент времени определяется из уравнения (2)v = v0 + att.
Уравнения (1) и (2) являются основными формулами равнопеременного движения и они содержат шесть различных величин: три постоянные: s0, v0, at и три переменные: s, v, t.
Следовательно, для решения задачи на равнопеременное движение точки в ее условии должно быть дано не менее четырех величин (систему двух уравнений можно решить лишь в том случае, если они содержат два неизвестных).
Если неизвестные входят в оба основных уравнения, например, неизвестны at и t, то для удобства решения таких задач выведены вспомогательные формулы:
после исключения at из (1) и (2) (3)s = s0 + (v + v0)t / 2;
после исключения t из (1) и (2) (4)s = s0 + (v2 - v02) / (2at).
В частном случае, когда начальные величины s0=0 и v0=0 (равноускоренное движение из состояния покоя), то получаем те же формулы в упрощенном виде: (5)s = att2 / 2; (6)v = att; (7)s = vt / 2; (8)s = v2 / (2at).
Уравнения (5) и (6) являются основными, а уравнения (7) и (8) – вспомогательными.
Равноускоренное движение из состояния покоя, происходящее под действием только силы тяжести, называется свободным падением. К этому движению применимы формулы (5)–(8), причем at = g = 9,81 м/сек2 ≈ 9,8 м/сек2.
32. Поступательное движение твердого тела.
Поступательное движение — РАВНОПЕРЕМЕННОЕ ДВИЖЕНИЕ точки - движение, при к-ром касат. ускорение wтточки (в случае прямолинейного движения полное ускорение w)постоянно. Закон Р. д. точки и закон изменения её скорости u при этом движении даются равенствами:
![]()
где
s - измеренное вдоль дуги траектории
расстояние точки от выбранного на
траектории начала отсчёта, t -
время, s0 -
значение s в нач. момент времени t = = 0. ![]() -
нач. скорость точки. Когда
знаки u и w одинаковы,
Р. д. является ускоренным, а когда разные
- замедленным.
-
нач. скорость точки. Когда
знаки u и w одинаковы,
Р. д. является ускоренным, а когда разные
- замедленным.
При поступат. Р. д. твёрдого тела всё сказанное относится к каждой точке тела; при равномерном вращении вокруг неподвижной оси угл. ускорение e тела постоянно, а закон вращения и закон изменения угл. скорости w тела даются равенствами
![]()
где f - угол поворота тела, f0 - значение f в нач. момент времени t = 0, w0 - нач. угл. скорость тела. Когда знаки w и e совпадают, вращение является ускоренным, а когда не совпадают - замедленным.
33.Вращательное движение твердого тела. Угловая скорость и угловое ускорение тела.
ращательное движение твердого тела вокруг оси. Угловая скорость и угловое ускорение
Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными (рис.13).
Проходящая через неподвижные точки А и В прямая АВ называется осью вращения.
Так как расстояния между точками твердого тела должны оставаться неизменными, то очевидно, что при вращательном движении все точки, принадлежащие оси вращения, будут неподвижны, а все остальные точки тела будут описывать окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси.
Для
определения положения вращающегося
тела проведем через ось вращения, вдоль
которой направим ось ![]() ,
полуплоскость - неподвижную и
полуплоскость, врезанную в само тело
и вращающуюся вместе с ним
(рис. 13).
,
полуплоскость - неподвижную и
полуплоскость, врезанную в само тело
и вращающуюся вместе с ним
(рис. 13).
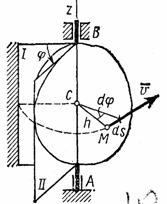
Рис.13
Тогда
положение тела в любой момент времени
однозначно определится взятым с
соответствующим знаком углом ![]() между
этими полуплоскостями, который назовем
углом поворота тела. Будем считать
угол
положительным,
если он отложен от неподвижной плоскости
в направлении против хода часовой
стрелки (для наблюдателя, смотрящего с
положительного конца оси
),
и отрицательным, если по ходу часовой
стрелки. Измерять угол
будем
всегда в радианах. Чтобы знать положение
тела в любой момент времени, надо знать
зависимость угла
от
времени t,
т.е.
между
этими полуплоскостями, который назовем
углом поворота тела. Будем считать
угол
положительным,
если он отложен от неподвижной плоскости
в направлении против хода часовой
стрелки (для наблюдателя, смотрящего с
положительного конца оси
),
и отрицательным, если по ходу часовой
стрелки. Измерять угол
будем
всегда в радианах. Чтобы знать положение
тела в любой момент времени, надо знать
зависимость угла
от
времени t,
т.е.
![]() .
.
Уравнение выражает закон вращательного движения твердого тела вокруг неподвижной оси.
Основными
кинематическими характеристиками
вращательного движения твердого тела
являются его угловая скорость ![]() и
угловое ускорение
и
угловое ускорение ![]() .
.
Если
за промежуток времени ![]() тело
совершает поворот на угол
тело
совершает поворот на угол ![]() ,
то численно средней угловой скоростью
тела за этот промежуток времени будет
,
то численно средней угловой скоростью
тела за этот промежуток времени будет ![]() .
В пределе при
.
В пределе при ![]() найдем,
что
найдем,
что
![]() или
или ![]() .
.
Таким образом, числовое значение угловой скорости тела в данный момент времени равно первой производной от угла поворота по времени. Знак определяет направление вращения тела. Легко видеть, что когда вращение происходит против хода часовой стрелки, >0, а когда по ходу часовой стрелки, то <0.
Размерность угловой скорости 1/Т (т.е. 1/время); в качестве единицы измерения обычно применяют рад/с или, что тоже, 1/с (с-1), так как радиан - величина безразмерная.
Угловую
скорость тела можно изобразить в виде
вектора ![]() ,
модуль которого равен |
|
и который направлен вдоль оси вращения
тела в ту сторону, откуда вращение видно
происходящим против хода часовой стрелки
(рис.14). Такой вектор определяет сразу
и модуль угловой скорости, и ось
вращения, и направление вращения
вокруг этой оси.
,
модуль которого равен |
|
и который направлен вдоль оси вращения
тела в ту сторону, откуда вращение видно
происходящим против хода часовой стрелки
(рис.14). Такой вектор определяет сразу
и модуль угловой скорости, и ось
вращения, и направление вращения
вокруг этой оси.
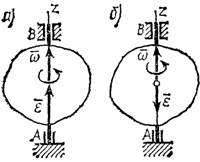
Рис.14
Угловое
ускорение характеризует изменение с
течением времени угловой скорости
тела. Если за промежуток времени ![]() угловая
скорость тела изменяется на величину
угловая
скорость тела изменяется на величину ![]() ,
то числовое значение среднего углового
ускорения тела за этот промежуток
времени будет
,
то числовое значение среднего углового
ускорения тела за этот промежуток
времени будет![]() .
В пределе при
найдем,
.
В пределе при
найдем,
![]() или
или ![]() .
.
Таким образом, числовое значение углового ускорения, тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени.
Размерность углового ускорения 1/T2 (1/время2); в качестве единицы измерения обычно применяется рад/с2 или, что то же, 1/с2 (с-2).
Если модуль угловой скорости со временем возрастает, вращение тела называется ускоренным, а если убывает, - замедленным. Легко видеть, что вращение будет ускоренным, когда величины и имеют одинаковые знаки, и замедленным, - когда разные.
Угловое ускорение тела (по аналогии с угловой скоростью) можно также изобразить в виде вектора , направленного вдоль оси вращения. При этом
![]() .
.
Направление совпадает с направлением , когда тело вращается ускоренно и (рис.14,а), противоположно при замедленном вращении (рис.14,б).