

48. Дифференциальные уравнения движения точки
С помощью дифференциальных уравнений движения решается вторая задача динамики. Правила составления таких уравнений зависят от того, каким способом хотим определить движение точки.
1) Определение движения точки координатным способом.
Рассмотрим
свободную материальную точку, движущуюся
под действием сил ![]() ,
,![]() ,..,
,.., ![]() . Проведем
неподвижные координатные оси Oxyz (рис.4).
Проектируя обе части равенства
. Проведем
неподвижные координатные оси Oxyz (рис.4).
Проектируя обе части равенства ![]() на
эти оси и учитывая, что
на
эти оси и учитывая, что ![]() и
т.д., получим дифференциальные
уравнения криволинейного движения
точки в
проекциях на оси прямоугольной
декартовой системы координат:
и
т.д., получим дифференциальные
уравнения криволинейного движения
точки в
проекциях на оси прямоугольной
декартовой системы координат:
![]() ,
, ![]() ,
, ![]() .
.
Рис.4
Так
как действующие на точку силы могут
зависеть от времени, от положения точки
и от ее скорости, то правые части уравнений
могут содержать время t, координаты
точки х,
у, z и
проекции ее скорости ![]() .
При этом в правую часть каждого из
уравнений могут входить все эти
переменные.
.
При этом в правую часть каждого из
уравнений могут входить все эти
переменные.
Чтобы
с помощью этих уравнений решить основную
задачу динамики, надо, кроме действующих
сил, знать еще начальные условия, т.е.
положение и скорость точки в начальный
момент. В координатных осях Oxyz начальные
условия задаются в виде: при ![]()
 .
.
Зная действующие силы, после интегрирования уравнений найдем координаты х, y, z движущейся точки, как функции времени t, т.е. найдем закон движения точки.
49.Динамика несвободной материальной точки. Несвободной называется материальная точка, на движение которой (координаты и скорость) наложены некоторые ограничения. Всякий механизм является примером несвободной системы материальных точек.
Связями называются ограничения движений материальных точек, не зависящие от начальных условий движения и системы приложенных сил. Связи делятся на двухсторонние и односторонние ( 1.физический маятник из твердого стержня; 2.математический маятник на нити).
Связи бывают голономные (интегрируемые) и неголономные (они накладывают ограничения на скорость точек, неинтегрируемые).
Связи, ограничивающие перемещения материальных точек, действуют на эти точки посредством сил, называемых силами реакции связей.
В задачах динамики несвободной материальной точки пользуются принципом освобождения от связей. Отбрасывая мысленно связи, включают силы реакций связей в число задаваемых сил. При этом несвободная материальная точка рассматривается как свободная, движущаяся под действием задаваемых сил и сил реакций связей.
50. Дифференциальные уравнения движения механической системы.
51.Центр масс механической системы. Координаты центра масс.
Система центра масс — система отсчёта, относительно которой центр масс механической системы неподвижен. Рассмотрим произвольную механическую систему твердых тел с заданным взаимным расположением в пространстве и с известными массами. Поступательное движение такой системы под действием внешних сил эквивалентно движению материальной точки, имеющей массу, равную массе системы, и находящейся под воздействием результирующей силы всех внешних сил.
Геометрическую точку, в которой располагается эта материальная точка, называют центром инерции или центром масс данной системы. Для произвольной неподвижной прямоугольной системы координат (ее называют также лабораторной системой) координаты центра масс определяются следующими формулами:
![]()
где mi, xi, yi, zi – массы и координаты центров масс тел, входящих в систему, а M – суммарная масса всех тел.
Если сумма внешних сил, действующих на систему, равна нулю, то центр масс остается неподвижным или движется прямолинейно с некоторой постоянной скоростью (в зависимостиот предыстории). В этом случае удобно рассматривать движение тел под действием внутренних сил в инерциальной системе отсчета, связанной с центром масс. В такой системе отсчета импульс системы равен нулю и будет оставаться нулевым при любых взаимодействиях между телами системы.
Перейдем к разбору конкретных задач.
52. момент инерции твердого тела. Радиус инерции.
Момент инерции тела относительно оси. Радиус инерции.
Положение центра масс характеризует распределение масс системы не полностью. Например (рис.32), если расстояния h от оси Oz каждого из одинаковых шаров А и В увеличить на одну и ту же величину, то положение центра масс системы не изменится, а распределение масс станет другим, и это скажется на движении системы (вращение вокруг оси Oz при прочих равных условиях будет происходить медленнее).
Рис.32
Поэтому в механике вводится еще одна характеристика распределения масс - момент инерции. Моментом инерции тела (системы) относительно данной оси Oz (или осевым моментом инерции) называется скалярная величина, равная сумме произведений масс всех точек тела (системы) на квадраты их расстояний от этой оси
![]()
Из определения следует, что момент инерции тела (или системы) относительно любой оси является величиной положительной и не равной нулю.
Заметим также, что момент инерции тела – это геометрическая характеристика тела, не зависящая от его движения.
Осевой момент инерции играет при вращательном движении тела такую же роль, какую масса при поступательном, т.е. что осевой момент инерции является мерой инертности тела при вращательном движении.
Согласно
формуле момент инерции тела равен сумме
моментов инерции всех его частей
относительно той же оси. Для одной
материальной точки, находящейся на
расстоянии h от
оси, ![]() .
.
Часто
в ходе расчетов пользуются понятием
радиуса инерции. Радиусом
инерции тела
относительно оси Оz называется
линейная величина ![]() ,
определяемая равенством
,
определяемая равенством
![]() ,
,
где М - масса тела. Из определения следует, что радиус инерции геометрически равен расстоянию от оси Оz той точки, в которой надо сосредоточить массу всего тела, чтобы момент инерции одной этой точки был равен моменту инерции всего тела.
В
случае сплошного тела, разбивая его
на элементарные части, найдем, что в
пределе сумма, стоящая в равенстве
, обратится
в интеграл. В результате, учитывая,
что ![]() ,
где
,
где ![]() -
плотность, а V-объем,
получим
-
плотность, а V-объем,
получим
![]() или
или ![]()
Интеграл здесь распространяется на весь объем V тела, а плотность и расстояние h зависят от координат точек тела.
Моменты инерции некоторых однородных тел:
1.Тонкий однородный стержень длины l и массы М. Вычислим его момент инерции относительно оси Аz, перпендикулярной к стержню и проходящей через его конец А (рис. 33).
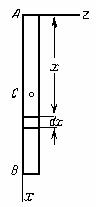
Рис.33
Направим
вдоль АВ координатную
ось Ах. Тогда
для любого элементарного отрезка
длины dx величина h=x, а
масса ![]() , где
, где ![]() - масса
единицы длины стержня. В результате
- масса
единицы длины стержня. В результате
![]()
Заменяя
здесь ![]() его
значением, найдем окончательно:
его
значением, найдем окончательно:
![]()
2. Тонкое круглое однородное кольцо радиуса R и массы М. Найдем его момент инерции относительно оси Cz, перпендикулярной плоскости кольца и проходящей через его центр (рис.34,а). Так как все точки кольца находятся от оси Cz на расстоянии hk=R, то
![]()
Следовательно,
для кольца ![]()
Очевидно, такой же результат получится для момента инерции тонкой цилиндрической оболочки массы М и радиуса R относительно ее оси.
3. Круглая однородная пластина или цилиндр радиуса R и массы М. Вычислим момент инерции круглой пластины относительно оси Сz, перпендикулярной к пластине и проходящей через ее центр (см. рис.34,а). Для этого выделим элементарное кольцо радиуса r и ширины dr (рис.34,б).



Рис.34
Площадь
этого кольца равна ![]() , а
масса
, а
масса ![]() , где
, где ![]() -
масса единицы площади пластины. Тогда
для выделенного элементарного кольца
будет
-
масса единицы площади пластины. Тогда
для выделенного элементарного кольца
будет
![]()
а
для всей пластины ![]() .
Заменяя здесь
.
Заменяя здесь ![]() его
значением, найдем окончательно
его
значением, найдем окончательно ![]()
Такая
же формула получится, очевидно, и для
момента инерции ![]() однородного
круглого цилиндра массы М и
радиуса R относительно
его оси Оz (риc.34,в).
однородного
круглого цилиндра массы М и
радиуса R относительно
его оси Оz (риc.34,в).
4. Прямоугольная пластина, конус, шар. Опуская выкладки, приведем формулы, определяющие моменты инерции следующих тел:
а) сплошная прямоугольная пластина массы М со сторонами АВ = а и BD = b (ось х направлена вдоль стороны AB, ось у - вдоль BD):
![]()
б) прямой сплошной круглый конус массы М с радиусом основания R (ось z направлена вдоль оси конуса):
![]()
г)
сплошной шар массы М и
радиуса R (ось z направлена
вдоль диаметра): ![]()
53. Моменты инерции тела относительно параллельных осей. Теорема Гюйгенса.
Моменты инерции данного тела относительно разных осей будут, вообще говоря, разными. Покажем, как зная момент инерции относительно какой-нибудь одной оси, проведенной в теле, найти момент инерции относительно любой другой оси, ей параллельной.
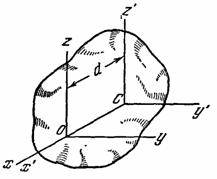
Рис.35
Проведем
через центр масс С тела
произвольные оси Cx'y'z', а
через любую точку О на
оси Сх'
- оси Oxyz, такие,
что ОyСy', OzCz' (рис.
35). Расстояние между осями Cz' и Оz обозначим
через d. Тогда
![]()
![]()
но,
как видно из рисунка, для любой точки
тела ![]() или
или ![]() ,
а
,
а ![]() .
Подставляя эти значения
.
Подставляя эти значения ![]() , в
выражение для
, в
выражение для ![]() и
вынося общие множители d 2 и 2d за
скобки, получим
и
вынося общие множители d 2 и 2d за
скобки, получим
![]()
В
правой части равенства первая сумма
равна Icz', а
вторая - массе тела М. Найдем
значение третьей суммы. На основании
формул для координат центра масс ![]() .Так
как в нашем случае точка С является
началом координат, то xC =
0 и, следовательно,
.Так
как в нашем случае точка С является
началом координат, то xC =
0 и, следовательно, ![]() .
Окончательно получаем:
.
Окончательно получаем:
![]()
Формула выражает следующую теорему Гюйгенса:
Момент инерции тела относительно данной оси равен моменту инерции относительно оси, ей параллельной, проходящей через центр масс тела, сложенному с произведением массы всего тела на квадрат расстояния между осями.
*)