

45. Ускорение точек плоской фигуры. Мгновенный центр ускорений.
Определение ускорений точек плоской фигуры
Покажем,
что ускорение любой точки М плоской
фигуры (так же, как и скорость) складывается
из ускорений, которые точка получает
при поступательном и вращательном
движениях этой фигуры. Положение
точки М по
отношению к осям Оxy (см.рис.30)
определяется радиусом-вектором ![]() где
где ![]() .
Тогда
.
Тогда
![]() .
.
В
правой части этого равенства первое
слагаемое есть ускорение ![]() полюса А,
а второе слагаемое определяет
ускорение
полюса А,
а второе слагаемое определяет
ускорение ![]() , которое
точка м получает при вращении фигуры
вокруг полюса A.
следовательно,
, которое
точка м получает при вращении фигуры
вокруг полюса A.
следовательно,
![]() .
.
Значение , как ускорения точки вращающегося твердого тела, определяется как
![]()
![]()
где
и
-
угловая скорость и угловое ускорение
фигуры, а
-
угол между вектором ![]() и
отрезком МА (рис.41).
и
отрезком МА (рис.41).
Таким
образом, ускорение любой точки М плоской
фигуры геометрически складывается из
ускорения какой-нибудь
другой точки А,
принятой за полюс, и ускорения, которое
точка Мполучает
при вращении фигуры вокруг этого полюса.
Модуль и направление ускорения ![]() , находятся
построением соответствующего
параллелограмма (рис.23).
, находятся
построением соответствующего
параллелограмма (рис.23).
Однако
вычисление
с
помощью параллелограмма, изображенного
на рис.23, усложняет расчет, так как
предварительно надо будет находить
значение угла
,
а затем - угла между векторами
и
, Поэтому
при решении задач удобнее вектор
заменять
его касательной ![]() и
нормальной
и
нормальной ![]() составляющими
и представить в виде
составляющими
и представить в виде
![]() .
.
При
этом вектор ![]() направлен
перпендикулярно АМ в
сторону вращения, если оно ускоренное,
и против вращения, если оно замедленное;
вектор
направлен
перпендикулярно АМ в
сторону вращения, если оно ускоренное,
и против вращения, если оно замедленное;
вектор ![]() всегда
направлен от точки Мк
полюсу А (рис.42).
Численно же
всегда
направлен от точки Мк
полюсу А (рис.42).
Численно же
![]()
![]()
![]() .
.
Если
полюс А движется
не прямолинейно, то его ускорение можно
тоже представить как сумму касательной ![]() и
нормальной
и
нормальной ![]() составляющих,
тогда
составляющих,
тогда
![]() .
.
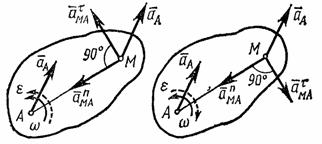
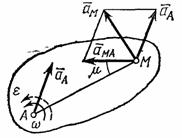
Рис.41 Рис.42
Наконец,
когда точка М движется
криволинейно и ее траектория известна,
то
можно
заменить суммой ![]() .
.
Мгновенный центр ускорений.
При непоступательном движении плоской фигуры у нее в каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется мгновенным центром ускорений. Определяется положение центра Q, если известны ускорение какой-нибудь точки А фигуры и величины и , следующим путем:
1) находим значение угла , из формулы ;
2) от точки А под углом , к вектору проводим прямую АЕ (рис.45);
при этом прямая АЕ должна быть отклонена от в сторону вращения фигуры, если вращение является ускоренным, и против вращения, если оно является замедленным, т. е. в сторону направления углового ускорения ;
3) откладываем вдоль линии АЕ отрезок AQ, равный
![]() .
.
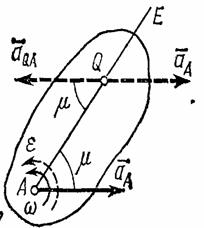
Рис.45
Построенная таким путем точка Q и будет мгновенным центром ускорений. В самом деле, известно что
![]() ,
,
где
численно ![]() . Подставляя
сюда значение AQ находим,
что
. Подставляя
сюда значение AQ находим,
что ![]() . Кроме
того, вектор
. Кроме
того, вектор ![]() должен
образовывать с линией AQ угол
,
следовательно, вектор
параллелен
,
но направлен в противоположную
сторону. Поэтому
должен
образовывать с линией AQ угол
,
следовательно, вектор
параллелен
,
но направлен в противоположную
сторону. Поэтому ![]() и
и ![]() .
.
Если
точку Q выбрать
за полюс, то так как ![]() ,
ускорение любой точки М тела,
будет
,
ускорение любой точки М тела,
будет
![]() .
.
При этом численно
![]() .
.
Следовательно, ускорения точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры, было вращением вокруг мгновенного центра ускорений Q. При этом
![]() ,
,
т.е. ускорения точек плоской фигуры пропорциональны их расстояниям от мгновенного центра ускорений. Картина распределения ускорений точек плоской фигуры в данный момент времени показана на рис.46.
Следует
иметь в виду, что положения мгновенного
центра скоростей Р и
мгновенного центра ускорений Q в
данный момент времени не совпадают.
Например, если колесо катится по
прямолинейному рельсу (см. рис.47), причем
скорость его центра С постоянна
(![]() ),
то мгновенный центр скоростей находится
в точке Р (
),
то мгновенный центр скоростей находится
в точке Р (![]() ),
но при этом, как было показано
),
но при этом, как было показано ![]() ;
следовательно, точка Р не
является одновременно мгновенным
центром ускорений.
;
следовательно, точка Р не
является одновременно мгновенным
центром ускорений.
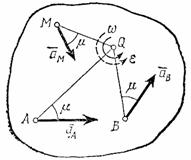
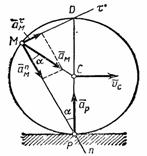
Рис.46 Рис.47
Мгновенный
центр ускорений в этом случае находится,
очевидно, в точке С,
так как она движется равномерно и
прямолинейно и ![]() . Центры
скоростей и ускорений совпадают
тогда, когда фигура (тело) вращается
вокруг неподвижной оси.
. Центры
скоростей и ускорений совпадают
тогда, когда фигура (тело) вращается
вокруг неподвижной оси.
Понятием о мгновенном центре ускорений удобно пользоваться при решении некоторых задач.