

Вопрос 26. Гармонические механические колебания. Дифференциальное уравнение и его решение. Скорость, ускорение, сила механических колебаний.
Согласно определению
скорости, скорость – это производная
от координаты по времени
![]()
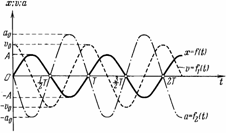
Таким образом, мы видим, что скорость при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания скорости опережают колебания смещения по фазе на /2.
Величина
![]() - максимальная скорость колебательного
движения (амплитуда колебаний скорости).
- максимальная скорость колебательного
движения (амплитуда колебаний скорости).
![]()
Следовательно, для скорости при гармоническом колебании имеем:
![]() ,
,
а для случая
нулевой начальной фазы
![]() (см. график).
(см. график).
Согласно определению ускорения, ускорение – это производная от скорости по времени:
![]() -
-
вторая производная
от координаты по времени. Тогда:
 .
.
Ускорение при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания ускорения опережают колебания скорости на /2 и колебания смещения на (говорят, что колебания происходят в противофазе).
Величина
![]()
- максимальное ускорение (амплитуда колебаний ускорения). Следовательно, для ускорения имеем:
![]() ,
,
а для случая нулевой
начальной фазы:
![]() (см. график).
(см. график).
Из анализа процесса колебательного движения, графиков и соответствующих математических выражений видно, что при прохождении колеблющимся телом положения равновесия (смещение равно нулю) ускорение равно нулю, а скорость тела максимальна (тело проходит положение равновесия по инерции), а при достижении амплитудного значения смещения – скорость равна нулю, а ускорение максимально по модулю (тело меняет направление своего движения).
Пусть материальная
точка осуществляет прямолинейные
гармонические колебания вдоль оси
координат х вокруг положения равновесия,
которое принято за начало координат.
Тогда зависимость координаты х от
времени t определяется уравнением:
![]() (1)
Продифференцировав (1) получим,
что скорость ν и ускорение а
колеблющейся точки равны соответственно
(1)
Продифференцировав (1) получим,
что скорость ν и ускорение а
колеблющейся точки равны соответственно
![]()
![]() (2)
Сила F=ma, которая действует
на колеблющуюся материальную точку
массой m, с учетом (1) и (2) будет равна:
(2)
Сила F=ma, которая действует
на колеблющуюся материальную точку
массой m, с учетом (1) и (2) будет равна:
![]() Значит,
сила прямо пропорциональна смещению
материальной точки из положения
равновесия и направлена в противоположную
сторону (т.е. к положению равновесия).
Значит,
сила прямо пропорциональна смещению
материальной точки из положения
равновесия и направлена в противоположную
сторону (т.е. к положению равновесия).
Вопрос 27. Вывод и анализ решения дифференциального уравнения затухающих механических колебаний. Декремент, логарифмический декремент затухания.
Рассмотрим свободные
затухающие колебания – колебания,
у которых амплитуды из-за потерь энергии
колебательной системой с течением
времени убывают. Простейшим механизмом
убывания энергии колебаний есть ее
превращение в теплоту вследствие трения
в механических колебательных системах,
а также потерь, связанных с выделением
теплоты, и излучения электромагнитной
энергии в электрических колебательных
системах.
Вид закономерностей
затухания колебаний задается свойствами
колебательных систем. Обычно рассматривают
линейные системы — идеализированные
реальные системы, параметры которых,
определяющие физические свойства
системы, в ходе процесса остаются
неизменными. Например, линейными
системами являются пружинный маятник
при малых растяжениях пружины (когда
выполняется закон Гука), колебательный
контур, у которого сопротивление,
индуктивность и емкость не зависят ни
от тока в контуре, ни от напряжения.
Различные по своей природе линейные
системы описываются аналогичными
линейными дифференциальными уравнениями,
что дает основания подходить к изучению
колебаний различной физической природы
с единой точки зрения, а также моделировать
их, в том числе и на ЭВМ.
Дифференциальное
уравнение свободных затухающих колебаний
линейной системы определяется как
![]() (1)
где s – колеблющаяся величина,
которая описывает тот или иной физический
процесс, δ = const — коэффициент затухания,
ω0 - циклическая частота свободных
незатухающих колебаний той же колебательной
системы, т. е. при δ=0 (при отсутствии
потерь энергии) называется собственной
частотой колебательной системы.
Решение уравнения (1) запишем в
виде
(1)
где s – колеблющаяся величина,
которая описывает тот или иной физический
процесс, δ = const — коэффициент затухания,
ω0 - циклическая частота свободных
незатухающих колебаний той же колебательной
системы, т. е. при δ=0 (при отсутствии
потерь энергии) называется собственной
частотой колебательной системы.
Решение уравнения (1) запишем в
виде
![]() (2)
где u=u(t). После взятия первой и
второй производных (2) и подстановки их
в выражение (1) найдем
(2)
где u=u(t). После взятия первой и
второй производных (2) и подстановки их
в выражение (1) найдем
![]() (3)
Решение уравнения (3) зависит от
знака коэффициента перед искомой
величиной. Рассмотрим случай положителньного
коэффициента:
(3)
Решение уравнения (3) зависит от
знака коэффициента перед искомой
величиной. Рассмотрим случай положителньного
коэффициента:
![]() (4)
(если (ω02 - σ2)>0,
то такое обозначение мы вправе сделать).
Тогда получим выражение
(4)
(если (ω02 - σ2)>0,
то такое обозначение мы вправе сделать).
Тогда получим выражение
![]() ,
у которого решение будет функция
,
у которого решение будет функция
![]() .
Значит, решение уравнения (1) в случае
малых затуханий (ω02 >> σ2
)
.
Значит, решение уравнения (1) в случае
малых затуханий (ω02 >> σ2
)
![]() (5)
где
(5)
где
![]() (6)
— амплитуда затухающих колебаний,
а А0 — начальная амплитуда.
Выражение (5) представлено графики рис.
1 сплошной линией, а (6) — штриховыми
линиями. Промежуток времени τ = 1/σ, в
течение которого амплитуда затухающих
колебаний становится мешьше в е раз,
называется временем релаксации.
(6)
— амплитуда затухающих колебаний,
а А0 — начальная амплитуда.
Выражение (5) представлено графики рис.
1 сплошной линией, а (6) — штриховыми
линиями. Промежуток времени τ = 1/σ, в
течение которого амплитуда затухающих
колебаний становится мешьше в е раз,
называется временем релаксации.
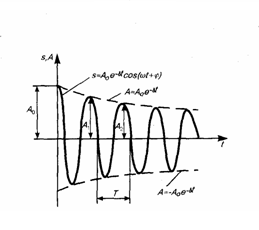
Рис.1
Затухание
не дает колебаниям быть периодичными
и, строго говоря, к ним нельзя применять
понятие периода или частоты. Но если
затухание мало, то можно условно
использовать понятие периода как
промежутка времени между двумя
последующими максимумами (или минимумами)
колеблющейся физической величины (рис.
1). В этом случае период затухающих
колебаний с учетом выражения (4) будет
равен
![]() Если
A(t) и А(t + Т) — амплитуды двух последовательных
колебаний, соответствующих моментам
времени, которые отличаются на период,
то отношение
Если
A(t) и А(t + Т) — амплитуды двух последовательных
колебаний, соответствующих моментам
времени, которые отличаются на период,
то отношение
![]() называется
декрементом затухания, а его логарифм
называется
декрементом затухания, а его логарифм
![]() (7)
— логарифмическим декрементом
затухания; Ne — число колебаний,
которые совершаются за время уменьшения
амплитуды в е раз. Логарифмический
декремент затухания является постоянной
величиной для данной колебательной
системы.
Для характеристики
колебательной системы также применяют
понятие добротности Q, которая при
малых значениях логарифмического
декремента будет равна
(7)
— логарифмическим декрементом
затухания; Ne — число колебаний,
которые совершаются за время уменьшения
амплитуды в е раз. Логарифмический
декремент затухания является постоянной
величиной для данной колебательной
системы.
Для характеристики
колебательной системы также применяют
понятие добротности Q, которая при
малых значениях логарифмического
декремента будет равна
![]() (8)
(так как затухание мало (ω02
>> σ2 ), то T принято равным Т0).
Из формулы (8) вытекает, что
добротность пропорциональна числу
колебаний Ne, которые система
совершает за время релаксации.
Выводы
и уравнения, полученные для свободных
затухающих колебаний линейных систем,
можно использовать для колебаний
различной физической природы —
механических (в качестве примера возьмем
пружинный маятник) и электромагнитных
(в качестве примера возьмем электрический
колебательный контур).
(8)
(так как затухание мало (ω02
>> σ2 ), то T принято равным Т0).
Из формулы (8) вытекает, что
добротность пропорциональна числу
колебаний Ne, которые система
совершает за время релаксации.
Выводы
и уравнения, полученные для свободных
затухающих колебаний линейных систем,
можно использовать для колебаний
различной физической природы —
механических (в качестве примера возьмем
пружинный маятник) и электромагнитных
(в качестве примера возьмем электрический
колебательный контур).