

4.6. Восприятие человеком 3-х мерных изображений
В основе объемного зрительного восприятия лежит бинокулярное зрение. Суть его в том, что проекция объекта на сетчатку глаз происходит под разными углами, благодаря чему изображение на глазном дне оказывается смещенным по горизонтали. Головной мозг анализирует эти изображения, оценивает их по ширине, высоте и в глубину.
Оценка глубины происходит на основе следующего:
а) Оценка глубины за счет эффекта перспективы: визуального сближения || линий в дали.
б) Анализ отраженных световых теней (яркостей) от разных точек объекта (они разные в глубину)
в) Оценка расстояния до объекта на основе информации о его размерах: чем меньше кажется объект, тем дальше он находится.
г) Оценка наложения предметов друг на друга: тот который кажется выше, находится ближе.
Есть ряд и других оценок.
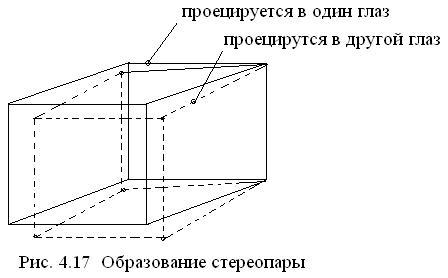
С учетом перечисленных факторов можно создавать объемные изображения за счет раздельного наблюдения каждым глазом двух почти одинаковых плоских изображений, развернутых в горизонтальной плоскости, относительно друг друга на небольшой угол, образуя таким образом стереопару.
Сформировать стереопару можно 2-мя проекциями от двух источников под разными углами.
Сложнее заставить каждый глаз видеть только одну половину стереопары. Решается эта задача в проекционных устройствах 2-мя способами:
Путем использования для каждого глаза отдельного экрана (на каждом из которых одна половина стереопары). Двухэкранный способ.
Проецирование двух изображений, составляющих стереопару на общий экран, с последующей селекцией элементов стереопары, обеспечивающей их разрядный показ каждому глазу. Одноэкранный способ.
Устройств, реализующих указанные способы формирования объемных изображений существует много, но все они дорогие и мало распространены.
Представляют собой
– дисплеи, закрепленные на голове (HDM – Head Mounted Display) в системах виртуальной реальности. Например: VR – шлемы, одеваемые на голову (кибершлемы).
– дисплеи, удерживаемые в руках (HHD – Hand Held Display) Например, бинокли.
Однако объемные изображения можно синтезировать и с помощью ЭВМ, для чего задается математическая модель объекта в 3-х мерной системе координат (каждую точку поверхности объекта). Далее аналитически рассчитываются зрительные эффекты а, б, в и г, рассмотренные ранее и полученное изображение проецируется на экран.
Совокупность приложений и задач для реализации 3х мерных изображений на экране монитора называют: 3-х мерной графикой или 3D-графикой.
Основные этапы синтеза 3-х мерного изображения
Построение геометрической модели объекта, путем задания координат ключевых точек его поверхности и уравнений линий их соединения.
Разбиение полученной поверхности на элементарные плоские элементы в виде прямоугольников или треугольников, то есть получение «граненной» поверхности: чем меньше элемент-грань, тем точнее будет поверхность. (Наподобие чешуи рыбы или змеи).
Этот этап называют триангуляцией.
Этап трансформации: моделируется движение объекта и изменение его размеров (формы). Этот процесс сводится к преобразованию координат вершин граней-элементов на основе реализации операций линейной алгебры и тригонометрических функций.
Производится расчет освещенности и затененности объекта с учетом удаленности от источника света, угла падения света. Все это делается по мере изменения координат перемещения объекта.
Далее происходит процесс преобразования 3-х мерного объекта в совокупность двумерных объектов, проецируемых на экран – то есть получение стереоэффекта, с сохранением информации о расстоянии от каждой вершины элементарной грани поверхности объекта до плоскости проекции.
Эта информация позволяет на последующих этапах определить: какие части объекта окажутся видимыми, а какие нет.
Этап обработки (настройки) данных о вершинах граней-элементов, то есть их сортировка, отбрасывание задних (невидимых) граней.
Далее существуют еще этапы с 7 по 13, на которых происходит прорисовка объекта (стадия редеринга), перевод его в растровое изображение, формирование кадрового буфера и т.д.
Этапы 1-6 называют еще геометрической стадией, когда выполняются основные вычисления.
Для реализации всех перечисленных этапов и предназначен 3D – акселератор. Набор выполняемых им функций есть его характеристика:
Несмотря на значительные различия в характеристиках и возможностях 3D-акселераторов, все они имеют ряд базовых элементов:
Геометрический процессор
Механизм прорисовки (формирования) изображения
Видеопамять
ЦАП (RAM DAC)
Дополнительные устройства в зависимости от набора выполняемых функций.
Появились 3D – акселераторы фотореалистичной графики (как например Radeoh 256) с качественно новым уровнем синтеза 3х мерных изображений. Разрешение достигает свыше 2048х2048 dip, 32-битная кодировка цвета, многофункциональные.