1.2. Ножевые опоры
(вернуться к оглавлению)
К
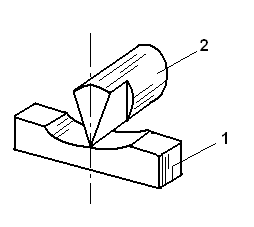
опорам трения качения относятся ножевые
опоры, состоящие из подушки 1 и призмы
2 (ножа), кромка которого представляет
цилиндрическую поверхность малого
радиуса(0,5
5мкм).
При малых углах отклонения ножа (8
10![]() )
имеет место чистое качание и момент
трения относительно мал. Например, при
весе гироузла 20H,
момент трения достигает (2
5)*10
)
имеет место чистое качание и момент
трения относительно мал. Например, при
весе гироузла 20H,
момент трения достигает (2
5)*10![]() Н*см.
Н*см.
Ножевые опоры применяются, главным образом, в качестве эталонных опор лабораторных стендов, с помощью которых определяются параметры гироприбора (в частности возможно применение в качестве чувствительных опор установки для проверки смещения центра тяжести гироузла в процессе работы и т. д.).
*
Рис.
2. Опоры с трением скольжения (вернуться к оглавлению)
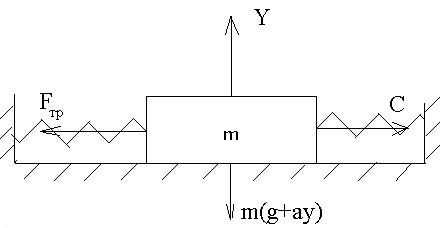
m ax=>x
ax=>x
Fтр=f*mg
x≠0
max≥Fтр=f*mg
f=0.01÷0.1
Многостепенный
подвес

Fтр=fN
Cx=max
![]() Fтр
Fтр
![]()
![]()
![]() -
относительная погрешность от Fтр
-
относительная погрешность от Fтр
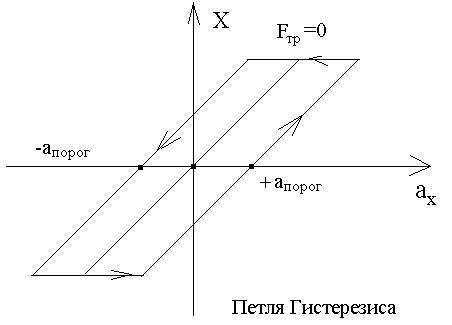
Т.к.
можно предположить, что
![]()
2.1. Плоскостные опоры
R
m
Fтр
x


mg
На плоскости: Ftr
= f*R R=mg


Рис.
(Дать пояснения)
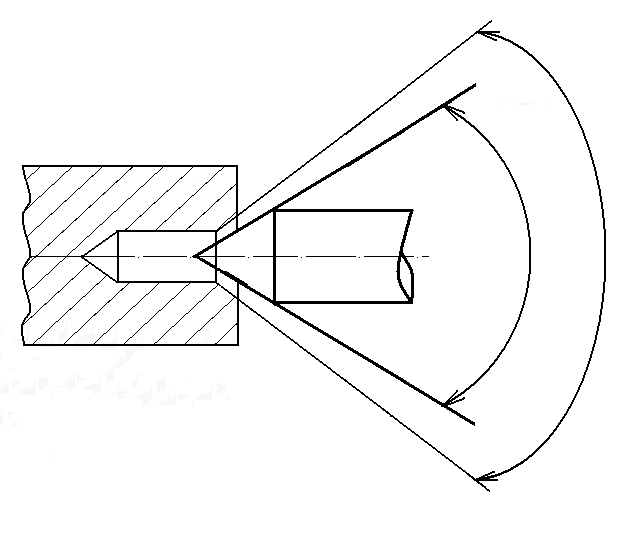
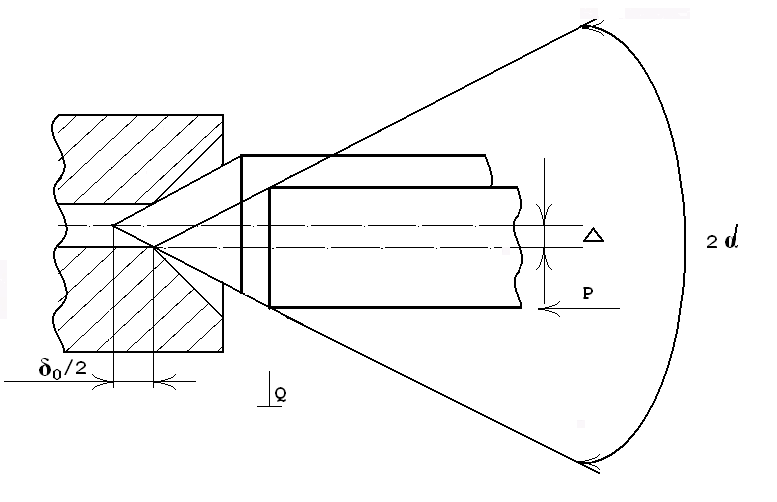
2.2. Конические опоры (вернуться к оглавлению)
*
Цапфа называется центром; подшипник имеет цилиндрическое отверстие с зенковкой (втулка). Центры и втулка могут смещаться в осевом направлении, это позволяет регулировать осевые и радиальные зазоры в том числе и при износе опор. Малая поверхность соприкосновения исключает возможность заклинивания даже при больших перекосах, но увеличивает износ особенно при вибрациях. Но возможно заклинивание при температурных деформациях. Поэтому необходим осевой зазор , который увеличивает и радиальный.
 *
*
Материал центров; У-10. У-12, Ст 40, 50 с закалкой ; НRс=50...60
Кобальт-вольфрамовые стали: Тi сплавы.
Подшипники могут быть и камни; а сталь с заколкой.
И спользуются
гам. где малые скорости вращения, а
нагрузки невысокие.
спользуются
гам. где малые скорости вращения, а
нагрузки невысокие.
*
![]()
В гироприборах почти не используются. Часто в ПММ.
2.3. Сферические опоры (на кернах) (вернуться к оглавлению)
Корпусная цапфа со сферической полированной поверхностью малого радиуса. опирающуюся на сферическую поверхность большего радиуса. Цапфа-керн: опора с вогнутой сферической поверхностью - подпятник или подушка.
*
Материал цапф: Углеродистые и сортовые стали: У-8А; 10А;12А: СоW сплав. Подпятник: камни (агат, рубин, корзид, сапфир); в гр... : бром, латунь, медь-берилий. никель-барилий.
Эти опоры имеют наименьший Мтр (из всех опор с трением). Применяются там, где нагрузки невелики. Но дают плохое центрирование.
Радиус
закругление керн:
![]() = 0,025... 0,2мм
= 0,025... 0,2мм
Радиус
подпятника:
![]() =
3...10
=
3...10
Требуется осевой зазор < 0,02...0,03мм- для вертикального керна
< 0,1 мм - для горизонтального керна.