

4.4. Особенности упругого подвеса и упругих элементов.
(вернуться к оглавлению)
M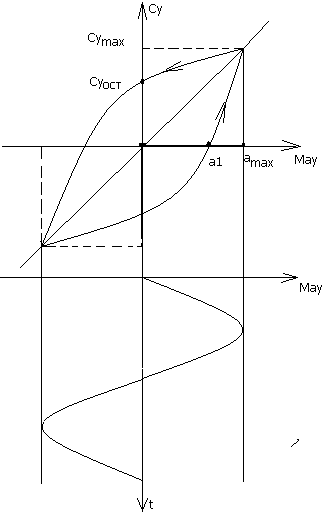 *ay=Cy
- условие статического равновесия
*ay=Cy
- условие статического равновесия![]() ay=Cy/M
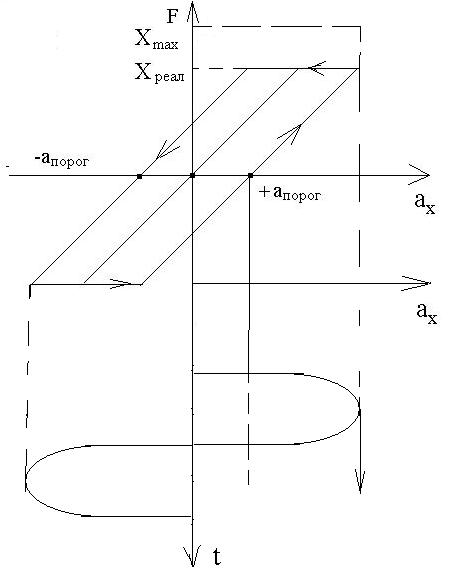
– калибровочная характеристика
акселерометра при наличие упругого
подвеса . В идеальном случае она линейна.
Но реально при знакопеременной нагрузке
появляется петля гистерезиса , площадь
которой характеризует энергию рассеивания
(диссипацию энергии ) системы.
ay=Cy/M
– калибровочная характеристика
акселерометра при наличие упругого
подвеса . В идеальном случае она линейна.
Но реально при знакопеременной нагрузке
появляется петля гистерезиса , площадь
которой характеризует энергию рассеивания
(диссипацию энергии ) системы.
Кривая деформации возрастает.
т-минимальное напряжение, при котором наблюдается самопроизвольная деформация предмета.
у-максимальное напряжение, при котором сохраняются упругие свойства. (рис. Дороб.обозначения, пояснения…)
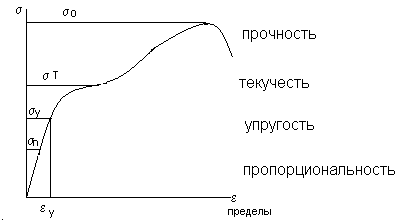
п-максимальное
напряжение, при котором наблюдается
линейная зависимость
от![]() .
.
Видим, что лучше придерживаться п, так как тогда процесс будет максимально приближен к идеальному.
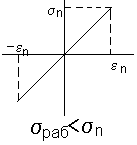
![]() -
характеристика гистерезиса
-
характеристика гистерезиса
![]() -остаточная
деформация, когда нагрузка снизилась
до нуля
-остаточная
деформация, когда нагрузка снизилась
до нуля
Гср.=10-3 -5*10-4 - сталь, бронза, латунь.
Г=10-4 -PtAg, K40HXMB, MP-40, MPB
Гкв/Гме<10-3 -кремний-кристалл (Si),
кварц,плавленый кварц (SiO2)
Также для достижения мелкозерновой структуры можно использовать вакуумные плавки.
УП- упругое последействие.
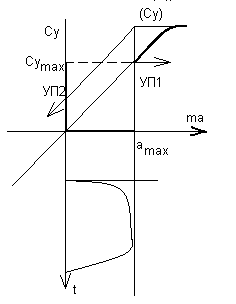 (Рис.
дораб. пояснения)
(Рис.
дораб. пояснения)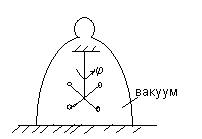 -самопроизвольное
изменение деформации после прекращения
действия внешних сил. В данном случае
это УП 1-го рода, т.к. оно состоит в
увеличении деформации при постоянстве
внешней силы. УП 2-го рода - состоит в
уменьшении деформации при постоянстве
внешней силы
-самопроизвольное
изменение деформации после прекращения
действия внешних сил. В данном случае
это УП 1-го рода, т.к. оно состоит в
увеличении деформации при постоянстве
внешней силы. УП 2-го рода - состоит в
уменьшении деформации при постоянстве
внешней силы
Внутреннее трение.
φ=φmSinωt
Крутильные колебания маятника в вакуумной установке будут затухать, так как источник рассеивания энергии является несовершенство внутреннего строения вещества.
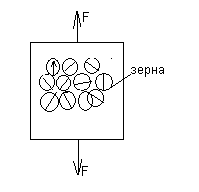
Внутреннее трение - подразумевает трение зерен между собой.
Технологические особенности, позволяющие снизить гистерезис:
1) «тренировка» (многократно повторяют гистерезис). Вследствие зерна занимают оптимальное место. Возможно совмещение с термообработкой.
2) «заневаливание». Перед локализацией расчетной нагрузки, элемент выдерживается при напряжении на 30% превышающей расчетной нагрузки. Другими словами его изначально нагружают, а затем отпускают в нужное состояние.
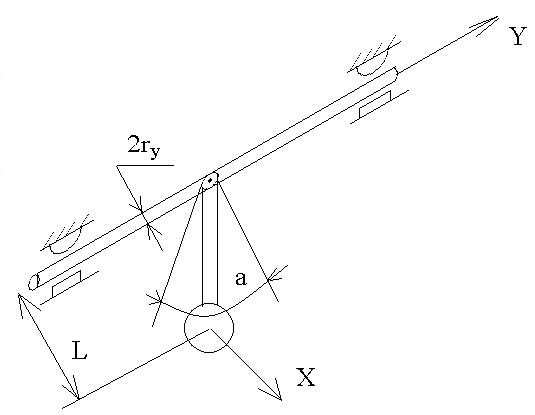
MgL=C*α
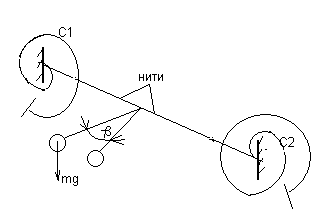
Рис. Доработать. Дать описание, пояснения.
C=C1+C2
5. Законы сухого трения. (вернуться к оглавлению)
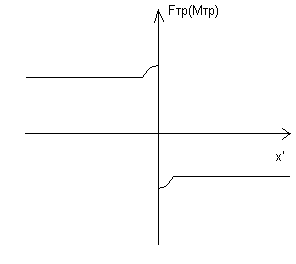
Рис. Доработать. Пояснения.
1![]()
 .
.
mgcosα >
![]()
cos α >
![]()
![]()
2. sign![]()
sign
![]()
3.
![]() -
не зависят от скорости, за исключением
случая 4.
-
не зависят от скорости, за исключением
случая 4.
4.
 >
>
5. Условия взаимного смещения соприкасающихся поверхностей
![]() >
>
![]() >
>
![]()
6. Уменьшение трения: Fтр уменьшается f, F, m.
![]()
M=maxLcos(a);![]()
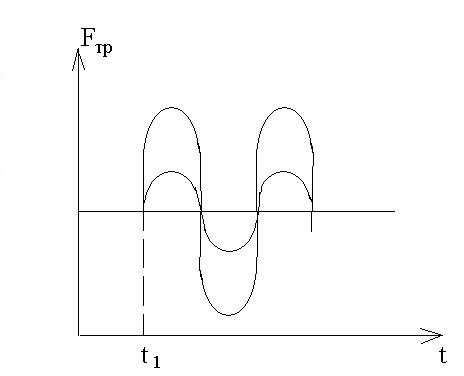
Соответствует Fтр и скорости
относительно решения
5.1 Статическая характеристика прибора (вернуться к оглавлению)
![]()
![]()
![]()
![]()
![]()
Угловое движение
max >
Cила трения в реальных условиях не является идеальной характеристикой, в результате чего появляется петля гистерезиса.