

Бесконтактные опоры (вернуться к оглавлению)
Электромагнитные, электростатические, магнитные, аэрогидростатические, аэрогидродинамические, комбинированные.


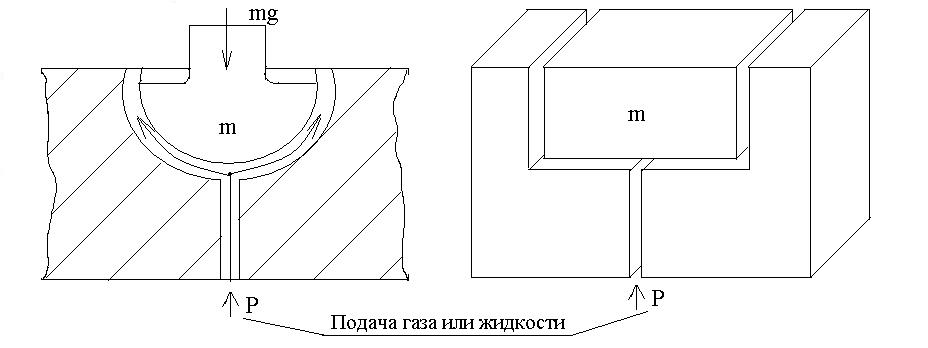
При P>Pатм – всплытие и подвижный элемент начинает скользить по салазкам.
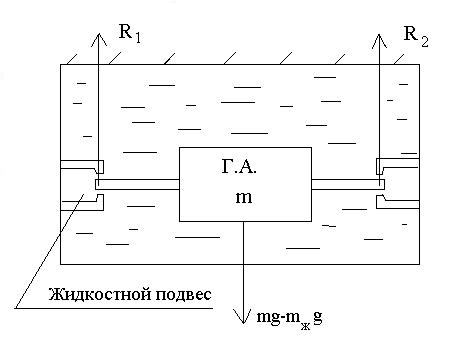
R1+R2=mg – сухой вариант
R1+R2=mg-mжg – жидкостной вариант
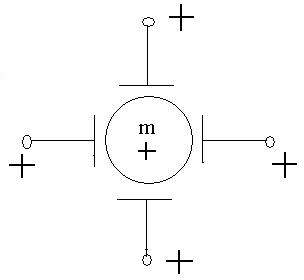
Э лектростатические опоры
Рис. Текст. доработать
Подвижные элементы поместим в жидкую среду, возникает архимедова сила.

Рис. доработать

Если для поплавковых ДУС можно реализовать нулевую плавучесть во всем температурном диапазоне и повысить точность испытания.
 Можно
выполнить только при
Можно
выполнить только при
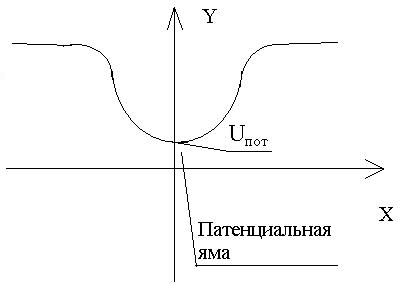
![]()
t0
Для акселерометров это условие применимо только в случае маятниковых акселером.
Такая поплавковая реализация: как правило опору можно рассматривать как комбинированную (обязательно либо упругая, либо контактная, с добавлением разгрузки.
3.2. Магнитные опоры (вернуться к оглавлению)
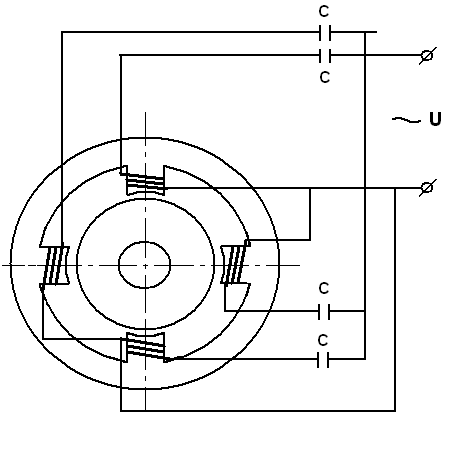
Для точного центрирования поплавкового гироузла в корпусе прибора и полного исключения механического контакта между поплавковым гироузлом и корпусом в поплавковых приборах вместо камниевых опор применяют магнитные опоры. Сочетание поплавкового подвеса с магнитным центрированием позволяет на два-три порядка понизить уровень возмущающих моментов благодаря полному устранению сухого трения, уменьшить габариты прибора при сохранении достаточной перегрузочной способности. Магнитные опоры воспринимают остаточный вес или плавучесть поплавкового гироузла и центрируют его относительно корпуса прибора. В поплавковых интегрирующих и дифференцирующих гироскопах и акселерометрах в качестве опор и центрирующих элементов применяются магнитные опоры резонансного типа. В качестве магнитных опор резонансного типа используются индукционные устройства типа «микросин», электромагнитные характеристики которых выбраны так, что центральное положение якоря подвеса относительно подвесов расточки полюсов статора является положением устойчивого равновесия.
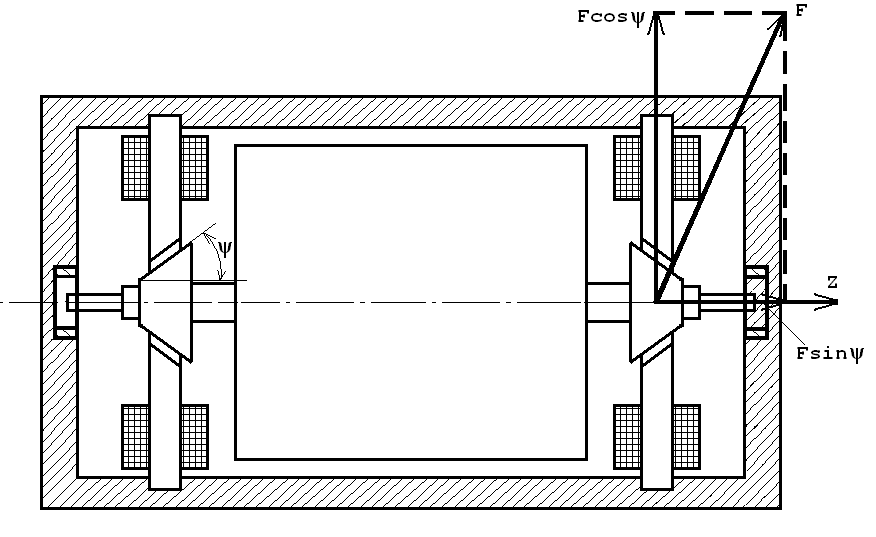
Для центрирования поплавкокого узла прибора в трёх взаимно перпендикулярных направлениях применяются два центрирующих элемента, имеющих коническую расточку полюсов магнитопроводов статора и якоря в форме усеченного конуса с углом 2 при вершине. Центрирование в радиальных направлениях осуществляется составляющей электромагнитных сил притяжения Fcos , а в осевом направлении – за счет Fsin .
Зазор между якорем и полюсами статора магнитной опоры обычно достигает десятка или нескольких десятков. При такой величине зазора заклинивание поплавкового гироузла в опорах прибора практически исключается.
*
*
Электрическая схема МРП принципиальная схема поплавкового прибора с магнитной опорой.
*
Конструктивные схемы узла МРП
Рис. доработать
3.3. Аэрогидростатический, аэрогидродинамический подвес
(вернуться к оглавлению)
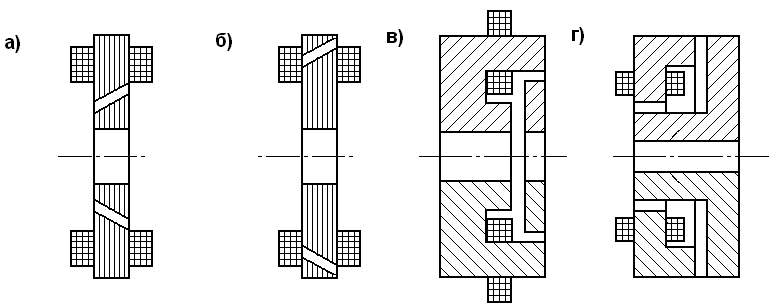
Газовые опоры или подшипники с газовой смазкой разделяются на два основных типа: с внешним наддувом и без наддува. В подшипнике с внешним наддувом (аэростатический подшипник) избыточное давление, уравновешивающее внешнюю нагрузку, создается при подаче сжатого газа от внешнего источника в зазор между шипом и подшипником. Такой подшипник обладает несущей способностью при любой относительной скорости поверхностей шипа и подшипника. Газовая пленка, разделяющая поверхность подшипника без наддува (аэродинамический подшипник), возникает вследствие увлечения окружающего подшипник газа в зазор между шипом и подшипником при относительном движении их поверхностей.
Аэродинамические подшипники значительно проще по конструкции аэростатических, но их можно использовать только при больших относительных скоростях вращения подшипника и цапфы. В место газа в таких подвесах может применяться и жидкость. Поэтому в обобщенном случае эти подвесы называются аэрогидростатический и аэрогидродинамический.
В гироскопических приборах повышенной точности для подвеса гироблоков применяются газовые подшипники с внешним наддувом. Газовые опоры полностью исключают механический контакт между шипом и подшипником, обладают малым моментом трения и способны работать в широком диапазоне температур.
В зависимости от назначения и конструктивного оформления в гироскопических приборах применяются сферические, радиальные цилиндрические и плоские упорные газовые подшипники.
Недостатком газовых подшипников с внешним наддувом является необходимость установки насоса или специальных устройств (баллонов) для хранения сжатого газа. Воздух или газ, используемый в качестве смазки в газовой опоре, должен быть тщательно высушен и очищен от паров воды и масла. Конденсация водяных и масляных паров газовой смазки в капиллярах, диафрагмах и рабочей щели подшипника загрязняет их и выводит подшипник из строя. Другим недостатком газовых опор является их высокая стоимость изготовления.
аэрогидростатический подвес
Р
Р >
PАТМ
Р – рабочее тело,
наддув
Р – рабочее тело,
наддув
Такой тип подвеса используется в контрольно-измерительных приборах,
морских компасах.
Аэрогидродинамический подвес

Ω = ΩКР
Рис. доработать