

5.2 Способы минимизации влияния сил трения на выходные характеристики (вернуться к оглавлению)
Mtr =Ftr*r =m*(g± aY)*f*rЦАПФ
Mtr =Ftr* rЦАПФ
М омент
трения можно снизить, уменьшив радиус
цапфы. Но накладываются ограничения по
прочности. Можно поместить цапфу в
жидкость, т.к. там прочность многократно
возрастёт.
омент
трения можно снизить, уменьшив радиус
цапфы. Но накладываются ограничения по
прочности. Можно поместить цапфу в
жидкость, т.к. там прочность многократно
возрастёт.
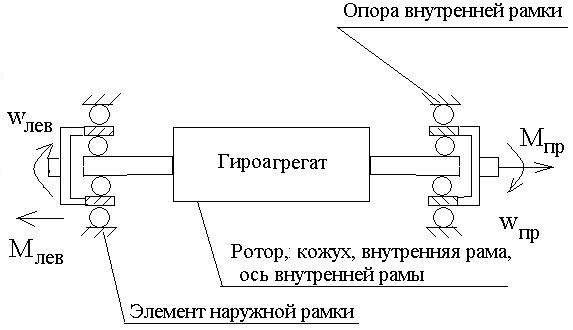
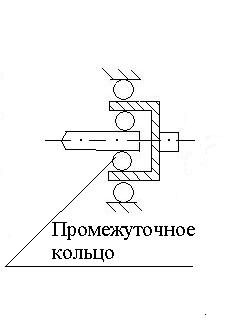
Существует также другой способ
снижения момента трения за счет введения
дополнительных вращений элементов
опор.
= (m*ax*l/c)*(1±
(m*(g± aY)/
aX)![]() )
)
6. Контактные опоры с виброподставкой (вернуться к оглавлению)
y” = - ym*ω2*sinωt
– виброускорение
N = m*g+m* ym*ω2*sinωt
m*g≤ m* ym*ω2
Таким образом мы сможем сузить зону нечувствительности на несколько порядков.
Виброподвес:
пъезоэффект;
магнитострикция;
- электромагнетизм
1 .
Пъезоэффект:
.
Пъезоэффект:
2. Магнитострикция – изменение линейных размеров магнитных материалов при изменении магнитного поля.
Рис. Доработки, пояснения, иллюстрация достигаемых эффектов.
Добавить материал, иллюстрирующий возможности снижения влияния трения на вых. характеристики. Рисунки, текст, графики, анемация.
На таких скользящих опорах построен класс акселерометров с порядком чувствительности Δах =(10-4 – 10-5)*g. Акселерометры МП- 43÷47.
R1 = R2 = m*(g± ay)/2
Fтр = f*(m*(g± ay))
Опоре придано вращение вокруг оси х с угловой скоростью ωx. Для снижения сил трения, действующих вдоль оси Ох опоры модифицируют.
3. Электромагнитный
Акселерометр с трением скольжения, сухого исполнения.
На такой основе построен целый класс акселерометров МП-43 до МП-47
Порог
зоны нечувствительности
![]()

![]()
![]()
Fтрх=Fтрcos(a),
где
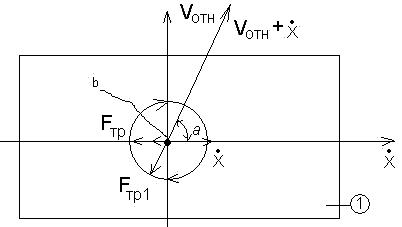
Эффект разновращающихся опор
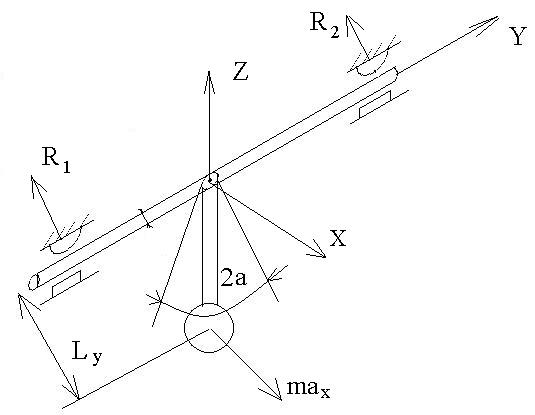
Маятниковый угловой акселерометр
Х – ось чувствительности
а – угол поворота
Ip- прецессия движения такого акселерометра.
![]()
![]()
![]()
![]()
![]()
Т.о

Тема 3. Преобразователи вида энергии в составе ип и д. Прямые преобразователи – датчики угловых и линейных перемещений ип
IV. Классификация преобразователей.
(вернуться к оглавлению)
Измерительная информация, получаемая от контролируемого объекта, передается в измерительную систему в виде сигналов какого-либо вида энергии и преобразуется из одного вида энергии в другой. Необходимость такого преобразования вызвана тем, что первичные сигналы не всегда удобны для передачи, переработке, дальнейшего преобразования и воспроизведения. Поэтому при измерении неэлектрических величин воспринимаемые чувствительным элементом сигналы преобразуются в электрические сигналы, являющиеся универсальными.
Та часть прибора, в которой неэлектрический измеряемый сигнал преобразуется в электрический, называется преобразователем.
Известно много электрических методов измерения неэлектрических величин. Для удобства изучения введем классификацию этих методов по виду связи между электрическими и неэлектрическими величинами:
Параметрические преобразователи, в которых измеряемая неэлектрическая величина преобразуется в соответствующее изменение параметров электрической цепи, питаемых внешними источниками ЭДС. При этом сигналы, получаемые от измеряемого объекта, служат только для управления энергией постороннего источника, включенного в цепь.
Генераторные преобразователи, в которых сигналы, получаемые от измеряемого объекта, непосредственно преобразуются в электрические сигналы. При этом желательный эффект преобразования может быть получен без использования посторонних источников ЭДС.
К параметрическим относят методы, основанные на изменении сопротивления, емкости и индуктивности электрических цепей.
К генераторным относятся электромагнитный, термоэлектрический, пьезоэлектрический и другие методы.