

2. Общая характеристика Измерительных Преобразователей.
(вернуться к оглавлению)

Акселерометр(измеряет кажущееся ускорение)
На рис. Представлена обобщенная структура электромеханическтого измерительного преобразователя (ИП)
ΔU(t)
Сигнал
управления
Рис. Обобщенная структура ИП
Позициями на Рис. обозначены:
ЧЭ - чувствительный элемент. Узел
ИП, непосредственно воспринимающий
измеряемый, контролируемый параметр
физический среды и преобразующий его
в промежуточный параметр в ИП в форму
удобную для последующего анализа.
В акселерометре это масса m,
в гироскопических устройствах –
кинетический момент
![]() .
.
Чаще всего входное воздействие на ЧЭ преобразуется в перемещение ЧЭ или деформацию элементов конструкции.
ПММ - передаточно-множительный механизм. Преобразует механическое смещение в механическое смещение иного диапазона, масштаба. Например, с использованием редуктора (в прецизионных ИП практически не применяется). В интегральных ИП это может быть упругий элемент в виде консольной балки, в которой точки приложения инерционной силы и «наблюдаемая» с помощью ДП точка упругой балки не совпадают. Здесь скрытно представлена передаточная функция ПММ.
КЗ – колебательное звено. Включает динамические звенья (инерционное, демпфирующее, позиционное), смещение которого - X2 преобразуется в электрический сигнал в ДП.
ДП или ДУ преобразователь механического смещения ЧЭ (линейного или углового) в электрический сигнал - U1. Это прямой преобразователь вида энергии (механической, запасаемой в ЧЭ, в электрическую).
УС - усилитель - преобразователь, усиливает сигнал U1 по напряжению – U2 и по мощности, обеспечивая его сопряжение с потребителями информации и с системой отображения (СО). В его состав может включаться преобразователь аналогового сигнала в цифровой эквивалент с помощью аналого-цифрового преобразователя (АЦП).
СО - система отображения информации.
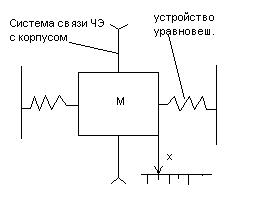
Кинематическая схема акселерометра
max

Корпус
ЧЭ
- М
Датчик перемещения
ЧЭ
(доработать рисунок или взять со стр. 17)
Рис. Кинематическая схема
На рис. обозначены основные конструктивные элементы и их взаимная кинематическая связь.
Условие динамического равновесия ЧЭ может быть записано в виде:
![]() .
.
В установившемся режиме имеем:
-
![]()
-
![]()
Т.е, смещение x ЧЭ относительно корпуса пропорционально измеряемой компоненте ускорения ax.
Здесь: - kд – коэффициент демпфирования (демпфер не показан);
- с – жесткость упругих связей ЧЭ с корпусом.
Параметры ориентации и навигации. Координаты центра тяжести ла относительно земли.
Ориентирование.
(вернуться к оглавлению)
Навигация – наука о методах и средствах перемещения известных объектов в известном пространстве, с известными целями и задачами, по желаемой траектории, с требуемым качеством (точность, быстродействие, безопасность, режим движения, энергозатраты и др.).
Для реализации задач навигации требуется:
Знание свойств окружающего пространства, в окрестности которого осуществляется движение.
Наличие объективных - естественных или субъективных - искусственных ориентиров или их комбинаций известным образом связанных с предполагаемой областью пространства, где осуществляется навигация.
Знание свойств самого перемещаемого объекта: наземный, морской, подводный, воздушный, космический, многосредный и др. Какими возможностями и ресурсами этот объект обладает.
Знание цели и задач, решаемых в процессе навигации с учетом наличных ресурсов.
Возможности моделирования на борту фрагментов, отражающих доминирующие свойства пространства с учетом поставленных целей. Моделирование ориентиров Пространства (физическое или математическое) с использованием бортового оборудования.
Начальная выставка приборных моделей по реальным ориентирам и последующая коррекция для компенсации инструментальных дрейфов и методических «уходов».
Измерения, вычисления текущего пространственного положения объекта относительно приборных осей и выработка команд управления. Здесь соединены воедино и задачи смещения центра масс объекта в пространстве и времени, и задачи угловой ориентации строительных осей объекта относительно базовых приборных моделей реальных или искусственных ориентиров пространства.
Физическими, естественными ориентирами могут быть: - местная или истинная вертикаль (равнодействующая гравитационной и центробежной силы); - гравитационная вертикаль (радиус-вектор из точки наблюдателя в центр тяжести Земли), - геоцентрическая вертикаль, (линия Север-Юг, как проекция оси мира на плоскость горизонта); - параметры атмосферы; - гравитационные и магнитные поля и их аномалии; - координаты объекта относительно искусственной координатной сетки Земли (меридианы, параллели, плоскость экватора и др.).
Свойства самого объекта (его тактико-технические характеристики, энергетические возможности, органы управления, приборное оборудование, авионика).
Приборное оборудование системы ориентации и навигации (СОН). Которое должно обеспечить моделирование на борту системы ориентиров. Относительно базовых приборных моделей появляется возможность оценивать текущее состояние строительных осей летательного аппарата (ЛА) и удерживать эти оси в требуемом состоянии.
Систему начальной выставки приборных ориентиров относительно начальной базы.
Систему непрерывной (периодической) коррекции приборных моделей пространственных ориентиров от внешних или дополнительных внутренних источников информации.
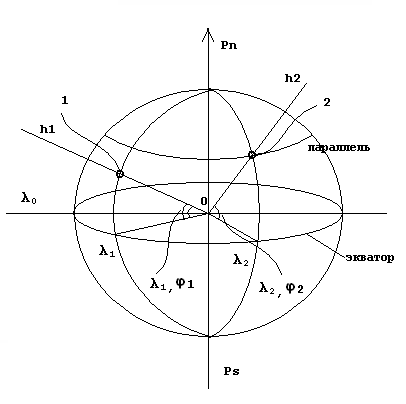
Под навигационными параметрами понимают параметры определяющие положение центра масс (долгота, широта и высота, скорость, ускорение).
*
- PN PS – ось вращения Земли, совпадает с осью мира;
-
![]() :
вертикаль места (геоцентрическая
вертикаль, гравитационная вертикаль);
:
вертикаль места (геоцентрическая
вертикаль, гравитационная вертикаль);
- плоскость экватора,
- параллель;
-
![]()
![]() - широта места. Угол наклона вертикали
места к плоскости экватора;
- широта места. Угол наклона вертикали
места к плоскости экватора;
4) h, PN, PS - плоскость меридиана места. Плоскость, включающая вертикаль места (точки 1 и 2 наблюдателя, ЛА) и ось Мира (ось вращения Земли).
Плоскости
меридианов, проходящие через точки 1 и
2, образуют двугранный угол
![]() - приращение долготы между точками 1 и
2.
- приращение долготы между точками 1 и
2.
В результате получаем приращение
(изменение) координат ЛА при смещении
из исходной точки 1 в точку 2:
результате получаем приращение
(изменение) координат ЛА при смещении
из исходной точки 1 в точку 2:
, - приращение долготы,
![]() Гринвичский
нулевой меридиан;
Гринвичский
нулевой меридиан;
![]() ,
- приращение широты,
,
- приращение широты,
Ортодромия - дуга большого круга, линия на поверхности земли, образованная пересечением поверхности земли с плоскостью ортодромии. Это – плоскость, проходящая через точки 1 и 2 (начальную и конечную точки маршрута) и центр земли. Ортодромия - это минимальное расстояние между двумя точками, лежащими на дуге большого круга, включающего центр Земли, а также начальную и конечную точку траектории.
Курс ЛА.
Угол курса.
Угол, измеренный в горизонтальной плоскости, между плоскостью меридиана места и проекцией продольной оси ЛА на плоскость горизонта. Или – угол в горизонтальной плоскости между проекциями на плоскость горизонта оси вращения земли (линия NS) и продольной оси ЛА.
Различают:
– истинный
курс -
![]() ,
если в качестве базы отсчета используется
истинный меридиан (вертикаль места –
ось Мира);
,
если в качестве базы отсчета используется
истинный меридиан (вертикаль места –
ось Мира);
-
магнитный курс -
![]() ,
измеряемый относительно плоскости
магнитного меридиана (вертикаль места
– ось магнитного диполя Земли).
,
измеряемый относительно плоскости
магнитного меридиана (вертикаль места
– ось магнитного диполя Земли).
Для определения курса движения ЛА необходимо смоделировать меридиан линию Север-Юг

![]() -
истинный курс ЛА,
-
истинный курс ЛА,
Nм- направление магнитного меридиана,
![]() -
магнитное склонение,
-
магнитное склонение,
Магнитный курс![]()
Магнитное склонение характеризует несовпадение истинного и магнитного меридианов, зависящее от координат места (функция широты и долготы места).
Акселерометры. (вернуться к оглавлению) *