

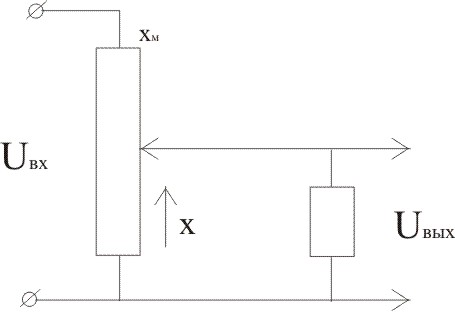
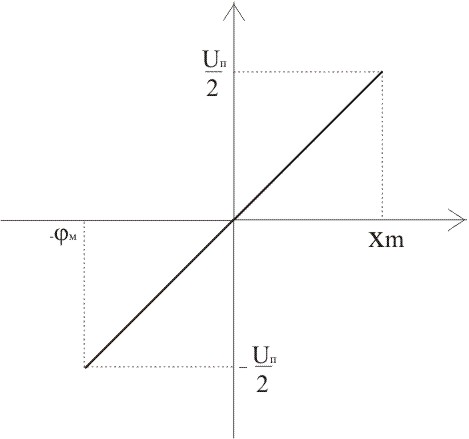
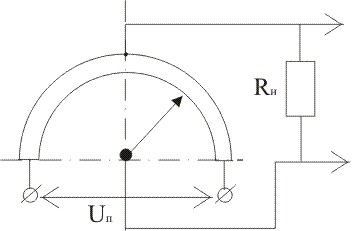
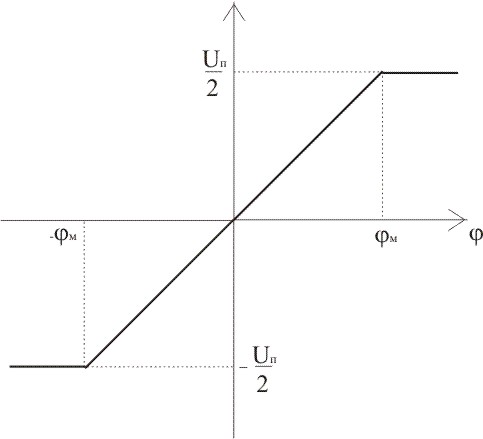
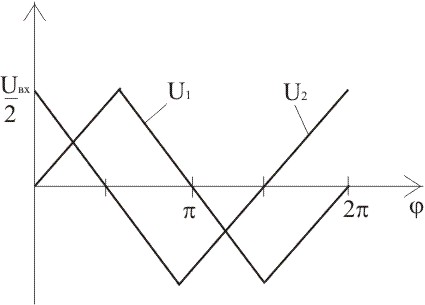
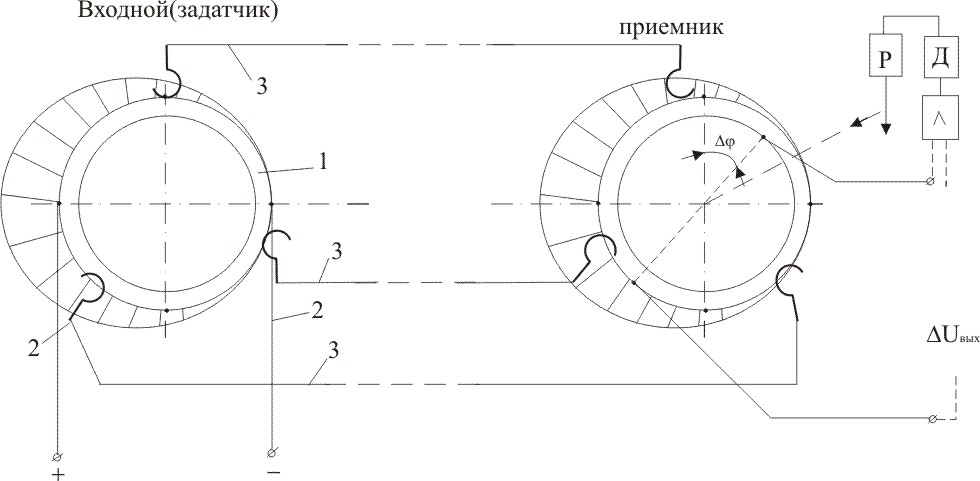
Схемы включения (линейных и угловых )
а) недифф.
б) знакочувстительное включение.
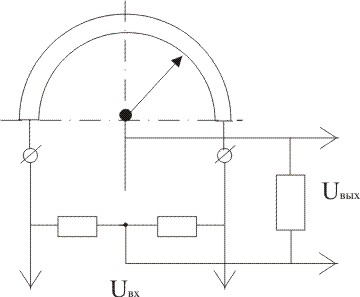
в) с искусств. ср. точкой
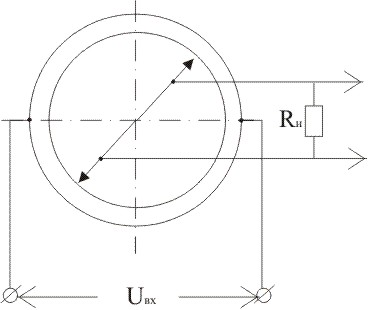
г) мостовая схема с 4-мя переменными плечами.
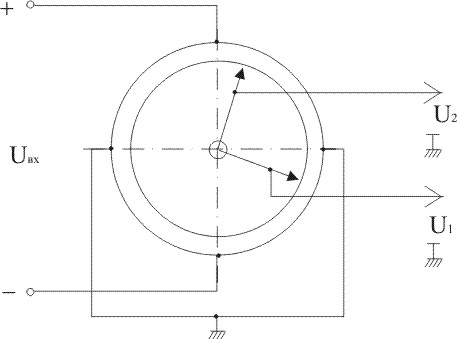
д)


а) б)
![]()
![]()



![]() ;
;
![]()
При
![]() =>
=>
![]()
Тензорезисторы
Изменение активного сопротивления проводников при их механической деформации.
![]() - коэффициент
относительной тензочувствительности.
- коэффициент
относительной тензочувствительности.
![]()
![]()
![]()
![]()
![]()
1.
Для жидких сред:
![]()
2.
Для металлов: т.к.
![]() - квадрат поперечного размера,
- квадрат поперечного размера,
![]()
а
![]() ,
то
,
то
![]()
![]()
![]() , т.е.
, т.е.
![]()
3. Для проводников:
![]()
![]()
![]()
![]() ,
т.е.
,
т.е.
![]()
8 Емкостные датчики
( 1)
1)
![]() - емкость плоского конденсатора с
“бесконечной” протяженностью пластин.
- емкость плоского конденсатора с
“бесконечной” протяженностью пластин.
![]() - диэлектрическая
проницаемость вакуума;
- диэлектрическая
проницаемость вакуума;
![]() -
относительная диэлектрическая
проницаемость среды.
-
относительная диэлектрическая
проницаемость среды.
![]() (2)
(2)
![]() (3)
(3)
Это емкостной преобразователь, основанный на фиксировании тока разряд-заряд емкости.
На основании (1),(2) и (3)
![]() (4)
(4)
(4) – раскрывает возможные способы воздействия на С.
В
этом варианте датчика
![]()
Некоторые варианты построения емкостных преобразователей и соотношения:
|
|
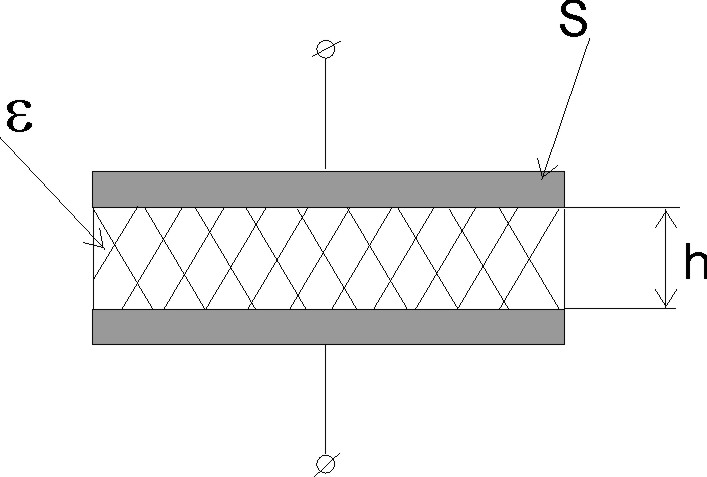
Емкость плоского конденсатора полностью заполненного диэлектриком |
|
|
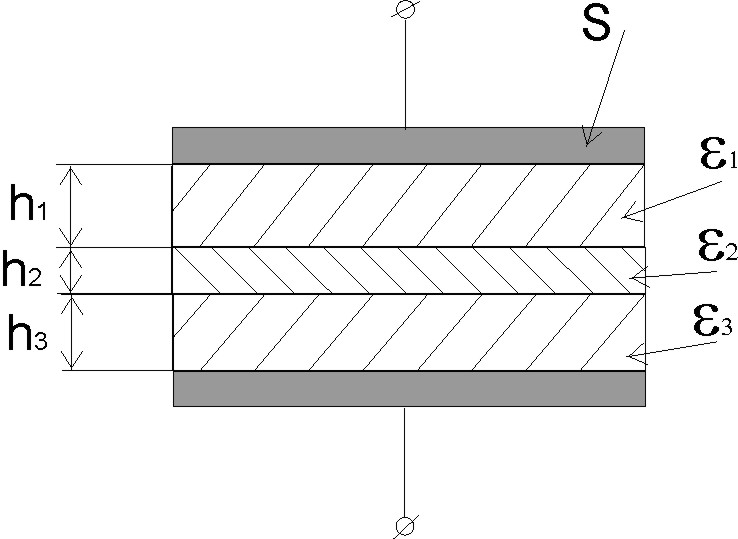
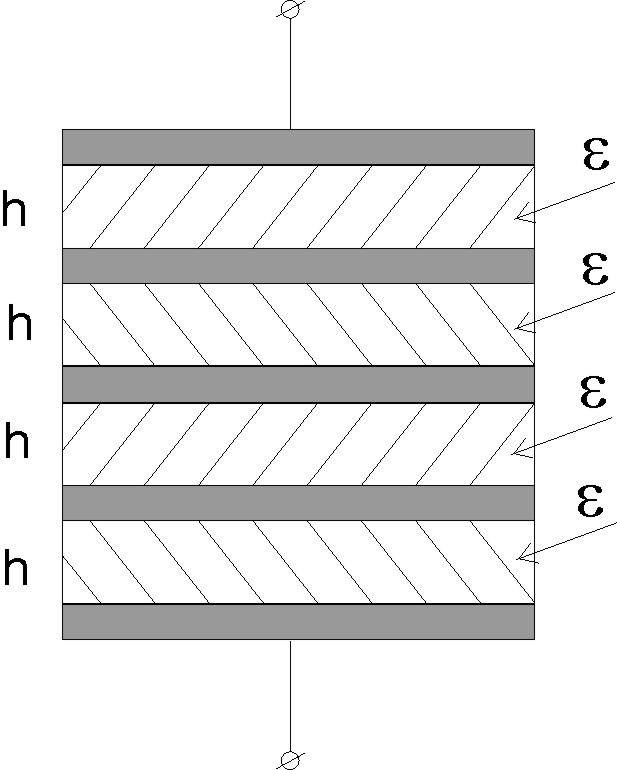
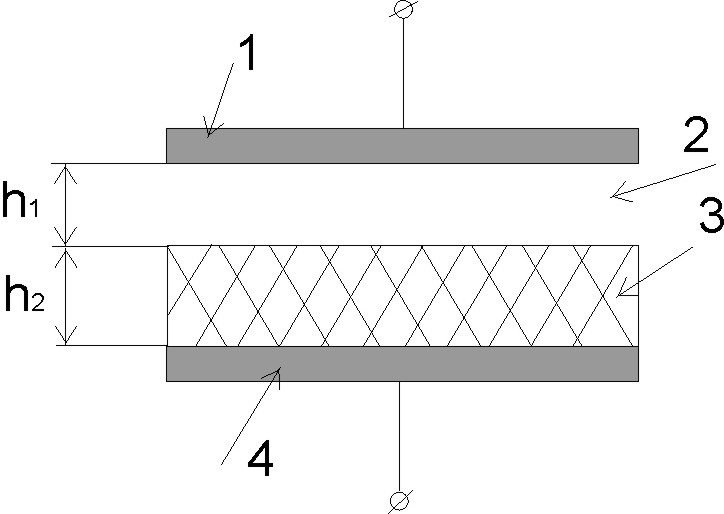
Конденсатор со слоистым диэлектриком 1,2,3 – индексы слоев с различными и h |
|
|
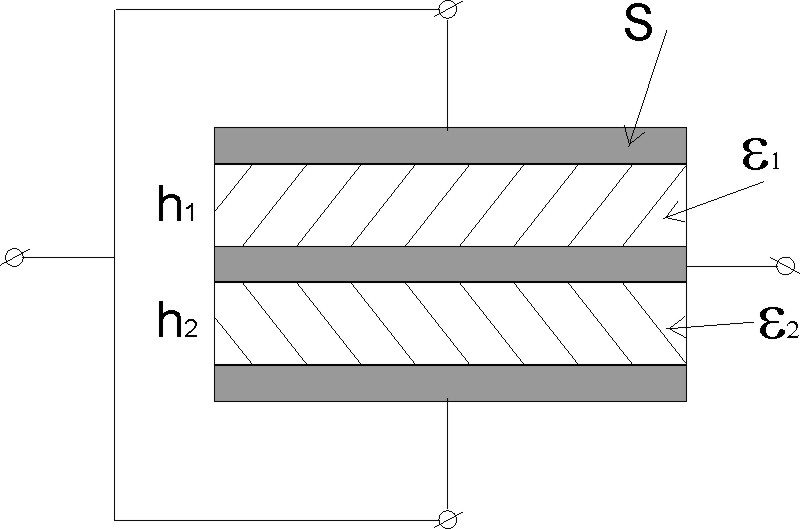
Конденсатор из n последовательно соединенных слоев, имеющий емкость меньшую, чем емкость одиночного конденсатора. |
|
|
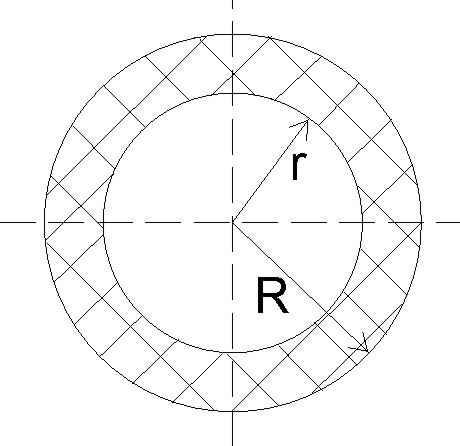
l – длина цилиндра
Если
|
|
|
|
|
|
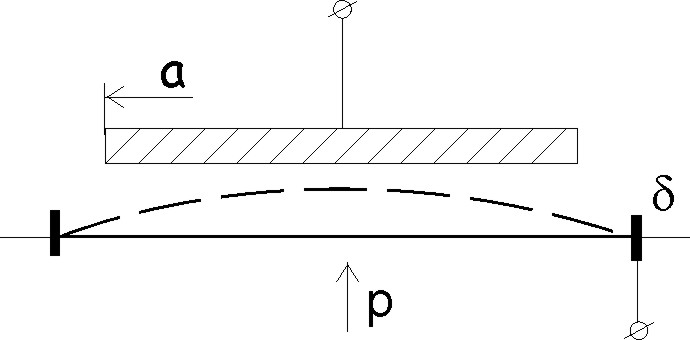
Гибкая мембрана |
|
|
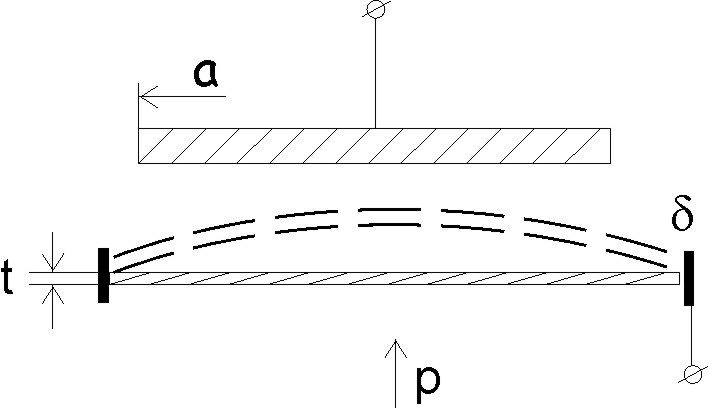
Мембрана-пластина толщиной t |
 _
_
 ;
;
Способы воздействия на емкость
![]()
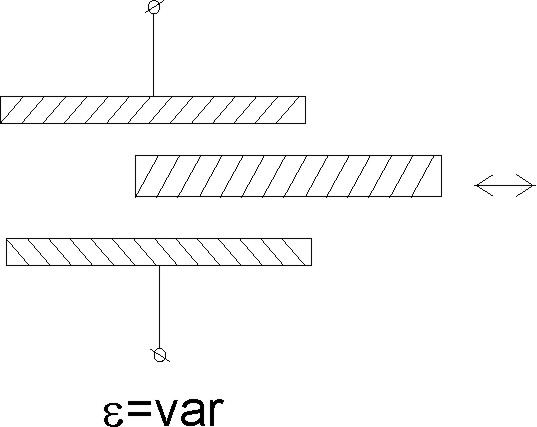
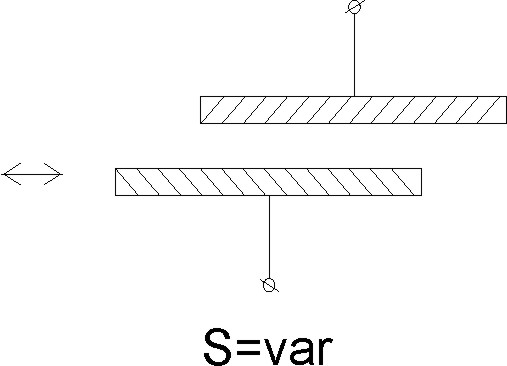
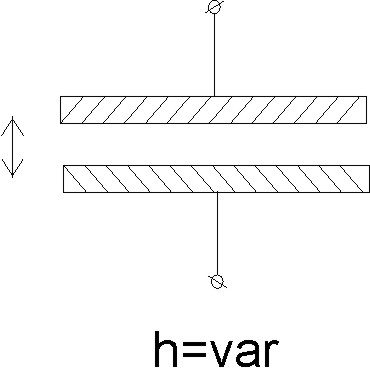
а)
– изменением S;
б) – изменением h;
в) – изменением
![]() .
.
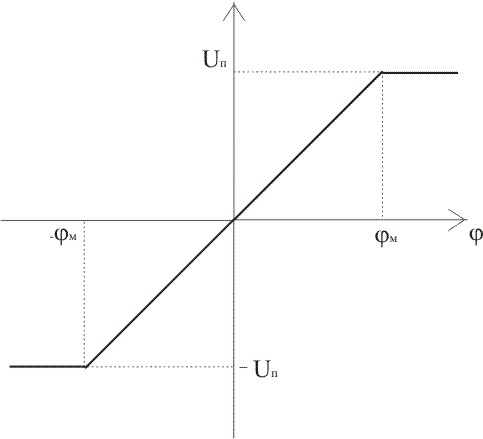
Понятия: линейность функции преобразования и крутизна характеристики.
![]()
![]()
![]()
![]()
 - проанализировать
при
- проанализировать
при
![]() - крутизна
зависимости;
- крутизна
зависимости;
![]() - в общем виде.
- в общем виде.
Эквивалентная схема
-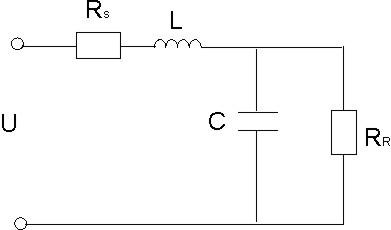 Как чистую емкость преобразователь
может быть представлен лишь на низких
частотах;
Как чистую емкость преобразователь
может быть представлен лишь на низких
частотах;
- Все ранее приведенные формулы взяты без учета “краевых” эффектов;
-
Эквивалентные схемы на низких и высоких
частотах различны. Здесь представлена
схема на низких частотах, где
![]() -
сопротивление утечки по постоянному
току. Им можно пренебречь можно на низких
частотах;
-
сопротивление утечки по постоянному
току. Им можно пренебречь можно на низких
частотах;
-
Диэлектрические потери в изолирующих
элементах содержат составляющую
проводимости
![]() и возрастают с ростом частоты. Тангенс
угла потерь -
и возрастают с ростом частоты. Тангенс
угла потерь -
![]() ;
;
-
![]() - сопротивление токоподводов, обмоток;
с ростом частоты они растут, т.к. возникает
поверхностный эффект;
- сопротивление токоподводов, обмоток;
с ростом частоты они растут, т.к. возникает
поверхностный эффект;
- L – полная индуктивность токоподводов.
Большинство
емкостных преобразователей можно
представить как чистую емкость С. Расчет
“геометрической емкости целого ряда
конфигураций, часто ведут без учета
краевых эффектов в соответствии с
формулами таблицы 1. Поведение конденсаторов
на низких и высоких частотах различно.
При низких частотах эквивалентная схема
представлена на рисунке.
![]() -
характеризует потери из-за утечки по
постоянному току. Ей можно пренебречь
даже при низких частотах.
-
характеризует потери из-за утечки по
постоянному току. Ей можно пренебречь
даже при низких частотах.
.
Чувствительность и линейность.
( 1)
1)
(2)
 ,
,
![]()
![]()
(3)
(4)
 ,
где
,
где
Если
![]() ,
то это будет конденсатор воздушный, без
диэлектрика.
,
то это будет конденсатор воздушный, без
диэлектрика.
Варианты включения емкостного датчика:
1. В цепь с источником постоянного напряжения:
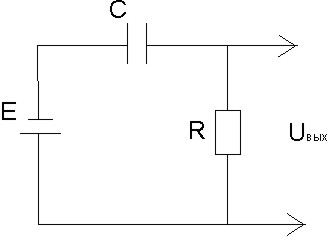
![]()
![]() ;
;
![]()
![]()
 ;
;
 ;
;
Если
![]() ,
то
,
то
 ;
;
![]()
Если
![]() ,
то
,
то
![]()
![]() ;
;
![]()
При
большой постоянной времени
![]() ,
в фазе с изменением С.
,
в фазе с изменением С.
Но
большая T может быть
обеспечено при повышении
![]() ,
но это ведет к снижению чувствительности.
Поэтому нужно повышать R
до тех пор пока оно не достигнет величины
сопротивления потерь в кабале. (
,
но это ведет к снижению чувствительности.
Поэтому нужно повышать R
до тех пор пока оно не достигнет величины
сопротивления потерь в кабале. (![]() - несколько герц)
- несколько герц)
Пусть
![]() =>
=>
![]()
![]() ;
;
![]()
![]() производная по
времени от входного сигнала, умноженная
на постоянную времени
.
производная по
времени от входного сигнала, умноженная
на постоянную времени
.
Стабильность преобразования зависит от стабильности R, которая обусловлено изменением нестабильных сопротивлений потерь и утечек в цепи.
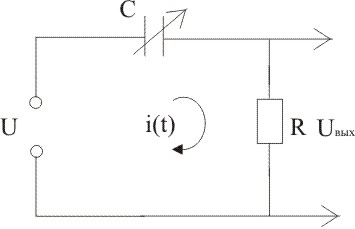
2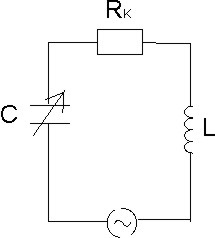 .
Включение емкостного датчика в цепь
колебательного контура с источником
переменного напряжения:
.
Включение емкостного датчика в цепь
колебательного контура с источником
переменного напряжения:
![]()
 ;
;
 ;
;
![]()
Пусть
![]() и
и
![]()
![]()
Тогда


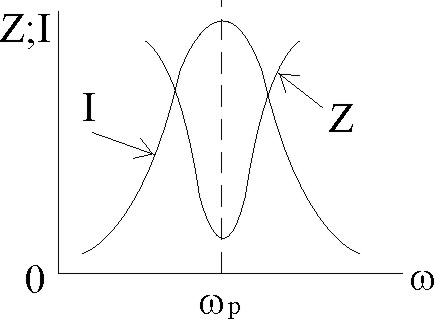
При
резонансе
![]() ;
;
![]()
тогда
вблизи резонанса:
![]()
![]() ;
;
![]() ;
;
![]() тогда
тогда
![]()
Если
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
3. Мостовые цепи переменного тока:
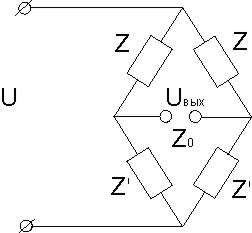
в
частном случае
![]()