

Обратные преобразователи.
Магнитоэлектрические приборы можно рассматривать как преобразователи электрических сигналов в механические.
Преобразователи электрической энергии в механическую.
Магнитоэлектрические преобразователи делятся на:
1). i → F, M – магнитоэлектрические преобразователи;
2). электромагнитные преобразователи;
3). электростатические преобразователи.
Рассмотрим пример магнитоэлектрического преобразователя:
 Доработать
рисунок
Доработать
рисунок
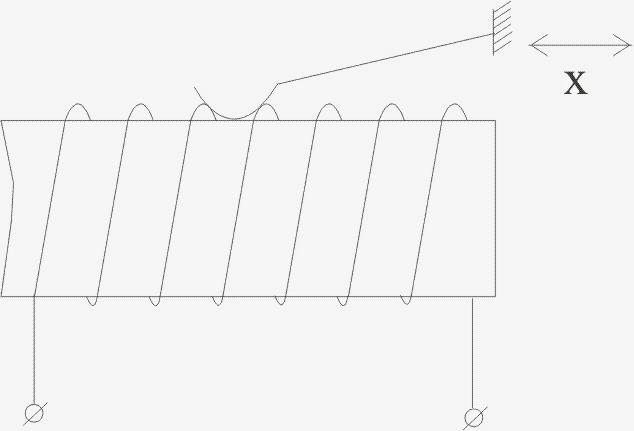
1 – магнит (магнитотвёрдый материал);
2 – арматура – магнитопровод;
3 – обмотка, помещенная в рабочем зазоре;
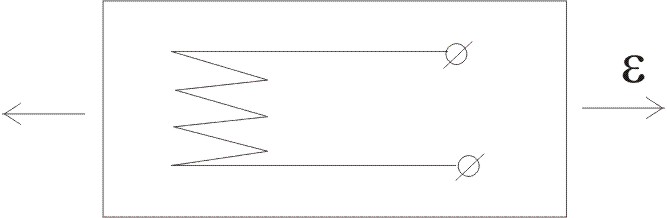
Электрическая схема:
Проведем расчет:
,
где
![]() магнитоэлектрический момент,
магнитоэлектрический момент,
![]() - позиционный момент, уравновешивающий
момент внешних сил,
- позиционный момент, уравновешивающий
момент внешних сил,
![]() -
электрическая жесткость.
-
электрическая жесткость.
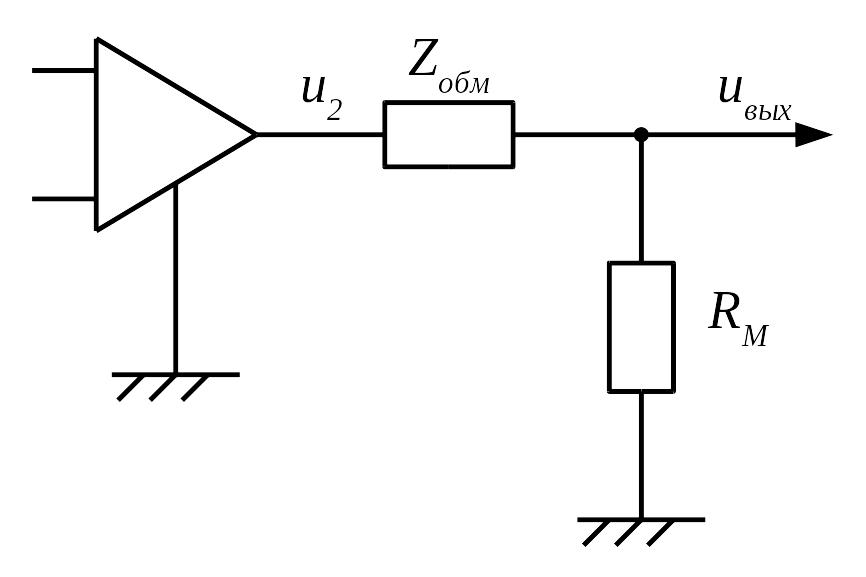
Разберем подробнее обратные преобразователи магнитоэлектрического типа. Он содержит:
1). постоянный магнит;
2). обмотка обратной связи.

![]()
Поместим
катушку
![]()

Тогда:
![]()

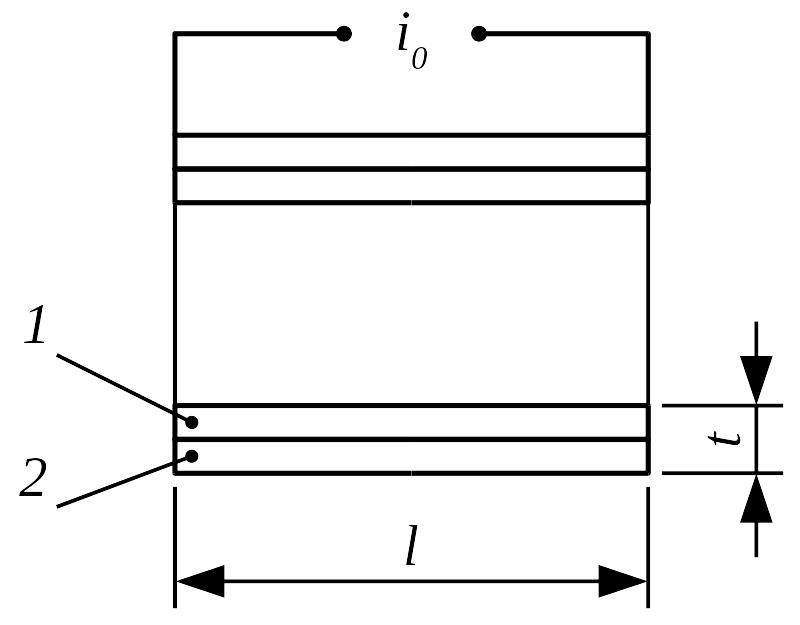
1 – тонкостенный металлический каркас (цилиндр);
2 – катушка;
1 – 1 – короткозамкнутый виток.
Каркас катушки – один короткозамкнутый виток. Таким образом:
, где t – толщина каркаса.
![]()
- , + соответственно отрицательная и положительная обратная связь.
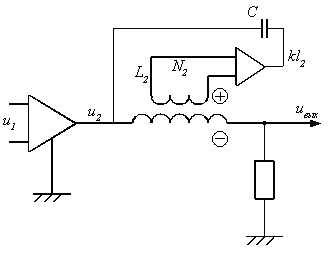
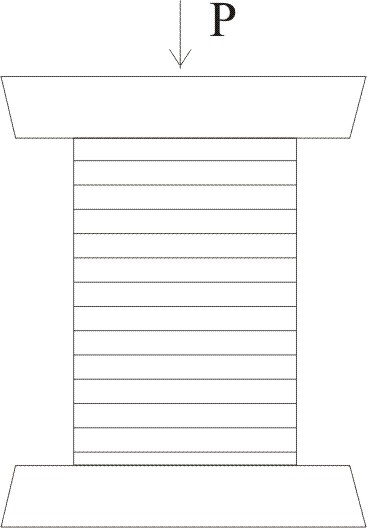
Рассмотрим демпфер магнитоэлектрического типа на базе обратного преобразователя:
3.1 – дополнительная обмотка демпфера;
3.2 – основная обмотка.
![]()
7 Резистивные преобразователи.
1. Название темы: Резистивные преобразователи. Параметрические.
2. Условное деление: - преобразователи с большой степенью изменения R;
- преобразователи с малой степенью изменения R;
3. Реостатные, потенциометрические(проволочные и непроволочные)
- конструкция и основные элементы
- разрешающая способность и шум; (электронный, молекулярный, контактный (вариация давления), контактная ЭДС, Термо ЭДС, вибрационный.
- чувствительность и линейность (нелинейность)
анометр. выражение и график
Параметры:
Каркас: керамика, аксидоров.алюминий, полистирол ЭД6 …
Требования: P,R – const; Vвых, Rизол
Термо ЭДС – min
Постоянство
d=d(l)=const;
![]() 2
2
Провод: Волочение, восстановление при отжиге. Эмаль, оксидирование.
Медно-никелевый константан, Никель хромистые, Никель-хром, железо-нихром;
Ag-колодиевый.
Контактная дорожка.
Щетка.
Преобразуют измеряемые параметры (перемещение, деформация, температура, скорость потока
и
т.п.) в изменения, приращение активного
сопротивления
![]() .
Все они требуют затрат электрической
энергии, обеспечивающей преобразование
механических величин в электрический
сигнал.
.
Все они требуют затрат электрической
энергии, обеспечивающей преобразование
механических величин в электрический
сигнал.
Существует много вариантов таких преобразователей, работающих на одинаковом принципе, но значительно различающиеся по конструкции.
a) контактный проволочный резистивные преобразователь R=R(x);

б)
бесконтактный проволочный ненаклеенный
![]() ;
;
в) бесконтактный проволочный наклеенный ;

г)
нить термоанемометра
![]() ;
;
д)
термосопротивление
![]() ;
;
е) угольный столб R=R(p);
ж) полупроводниковые
Условное деление
К преобразователям с большой степенью изменения R: (а)
Реостатные, потенциометрические(проволочные и пленочные), датчики перемещения и угла.
Основные характеристики: разрешающая способность, шум.
Достоинства:
Простота, возможность работы на постоянном
(Uо=const)
и переменном токе (![]() ).
Высокая удельная мощность выходного
сигнала и возможность без предварительного
усиления и согласования “работать”
на реальную нагрузку.
).
Высокая удельная мощность выходного
сигнала и возможность без предварительного
усиления и согласования “работать”
на реальную нагрузку.
Недостатки: Наличие механического контакта между частями (трение; возможный “дребезг”; разрыв контакта; износ, т.е. ограниченный ресурс; нестабильность переходного R и т.п.)
Р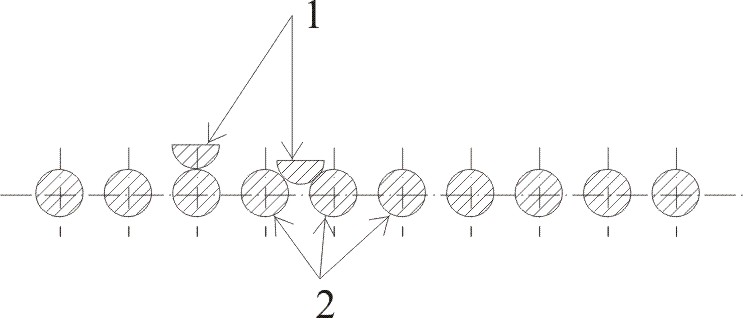 азрешающая
способность и шум.
азрешающая
способность и шум.
1- щетка, медхолапка
2- сочетание витков
![]()
 - разрешающая
способность в случае, когда щетка не
может одновременно касаться 2-х
витков. При переключении сразу
переходит с витка на виток.
- разрешающая
способность в случае, когда щетка не
может одновременно касаться 2-х
витков. При переключении сразу
переходит с витка на виток.
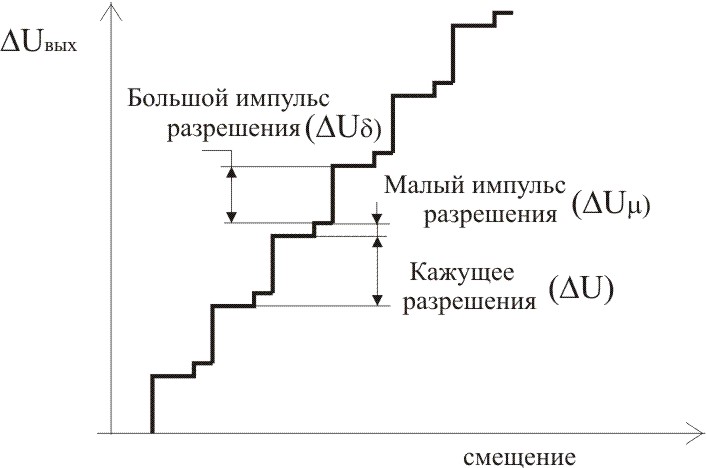
В действительности щетка в процессе движения обязательно закорачивает смежные витки. Поэтому замыкания 2-х первых и 2-х последних не дает изменения выходного напряжения. Общее число “ступенек” будет (2-W-2) импульсов разрешения.
Амплитуда
![]() -
меньшего импульса при закорачивании x
витка с (х+1):
-
меньшего импульса при закорачивании x
витка с (х+1):
![]()
Амплитуда
![]() -меньшего
импульса:
-меньшего
импульса:
![]()
Это рассмотрение идеализирует процесс, т.к. предполагает определенную геометрию щетки, способной перестроить не более 2-х витков. Малый радиус щетки в сочетании с относительно мягкими сплавами способствует быстрому развитию уплощений и м.повредить дорожку на обмотке.
Чрезмерно большой радиус щетки при самом небольшом износе может закоротить три и более витков, что понижает точность.
Рекомендуют десятикратное отношение радиуса щетки к радиусу провода.
Шум
– любой постоянный резистор является
генератором шума за счет случайных
движений электронов и теплового движения
молекул. Частотный спектр – равномерный,
амплитуда зависит от R и
![]() - это так называемый шум Джонсона и
обычно мал.
- это так называемый шум Джонсона и
обычно мал.
В переменных резисторах генерируется дополнительный шум при движении щетки дорожке. Контактный шум – из-за вариации контактного давления – это самая сложная и существенная составляющая, имеет тенденцию к росту во времени из-за износа, загрязнения и окисления.
Генерирование малых напряжений от трения между разнородными металлами щетки и дорожки. Его можно уменьшить до 300 мкВ соответствующим подбором материала.
Термо ЭДС при работе на постоянном токе при высокой .
Вибрационный
или скоростной шум, вызванный вибрацией
щеток можно достигать
![]() при временном разрыве контакта. Его
надо устранять любыми способами. Для
каждого сочетания конструкций щетки и
дорожки существует рациональная скорость
движения, которую нельзя превышать.(контактное
давление, многощеточные узлы)
при временном разрыве контакта. Его
надо устранять любыми способами. Для
каждого сочетания конструкций щетки и
дорожки существует рациональная скорость
движения, которую нельзя превышать.(контактное
давление, многощеточные узлы)
Чувствительность линейность.
![]()
![]() - определяется
рассеиваемой мощностью и допустимым
перегревом обмотки. Зависит от сечения
и R провода, условий
охлаждения, тепловых характеристик
каркаса и его размеров и формы. Так как
конструктивные особенности м.д. самые
разные и трудно их проигнорировать,
необходимо следить за таким обобщенным
показателем , как плотность тока.
- определяется
рассеиваемой мощностью и допустимым
перегревом обмотки. Зависит от сечения
и R провода, условий
охлаждения, тепловых характеристик
каркаса и его размеров и формы. Так как
конструктивные особенности м.д. самые
разные и трудно их проигнорировать,
необходимо следить за таким обобщенным
показателем , как плотность тока.
![]()
Для
которых в, рад. на воздухе
![]() при каркасе из анодированного алюминия.
Для каркасов из изоляционного материала
при каркасе из анодированного алюминия.
Для каркасов из изоляционного материала
![]() .
Для которого д. угла в жидкостной среде
.
Для которого д. угла в жидкостной среде
![]()
Собственная
линейность ненагруженного потенциала
определяется числом витков
![]() .
Для уменьшения нелинейности необходимо
увеличить W, но при этом
необходимо уменьшить
.
Для уменьшения нелинейности необходимо
увеличить W, но при этом
необходимо уменьшить
![]() .
Это приводит к увеличению числа
закорачиваемых витков при смещении
щетки.
.
Это приводит к увеличению числа
закорачиваемых витков при смещении
щетки.
Т.е. с уменьшением улучшается разрешающая способность, но с точки зрения линейности с какого-то момента времени улучшение не происходит.

Схемная нелинейность:
![]() ,
где
,
где
![]()
![]() крутизна
крутизна
![]() ;
Нелинейность
;
Нелинейность
Е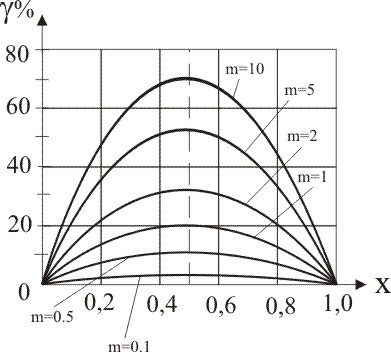 сли,
например, необходимо чтобы
сли,
например, необходимо чтобы
![]() ,
то
,
то
![]()
Дополнительно
для линеаризации можно обеспечить
профилирование каркаса: включить
![]() ,
щетка которого определенным образом
связана с основной щеткой.
,
щетка которого определенным образом
связана с основной щеткой.
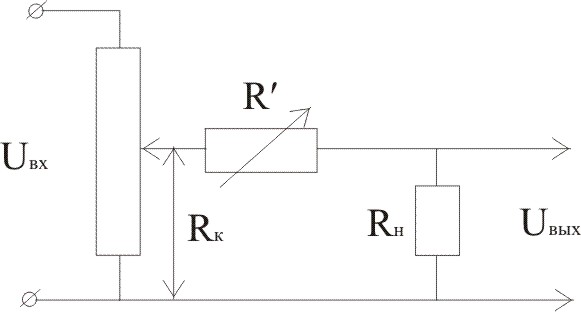
Мощность в нагрузке:
![]()

![]() -
допустимая мощность определяется рядом
факторов: - сечения и R
провода потенциометра, условий охлаждения,
материала и теплопроводных свойств
каркаса - т.е. конструктивными особенностями
и свойствами окружающей среды. Обобщенной
характеристикой является плотность
тока
-
допустимая мощность определяется рядом
факторов: - сечения и R
провода потенциометра, условий охлаждения,
материала и теплопроводных свойств
каркаса - т.е. конструктивными особенностями
и свойствами окружающей среды. Обобщенной
характеристикой является плотность
тока
![]() .
.
- для алюминиевого каркаса и воздушной среды;
![]() - для жидкостной
среды.
- для жидкостной
среды.
Видно, чтобы необходимо
К преобразователям с малой степенью изменения R: (б,в,г,д,е,ж)
Основные характеристики: чувствительность.
Тензорезистивные преобразователи, которые в общем случае могут быть с жидкостным рабочим телом, с металлическим или полупроводниковым ЧЭ.
Конструкция.
Каркас: круглого или прямоугольного поперечного сечения.
Требования:
1.Постоянство электрических параметров:
![]() ;
контактного усилия; контактного
сопротивления в процессе работы; и при
наличии ускорений; R при
t=var;
;
контактного усилия; контактного
сопротивления в процессе работы; и при
наличии ускорений; R при
t=var;
![]() ;
;
![]() при повышенной
,
в присутствии пыли и влажности; малость
потенциалов от ТермоЭДС.
при повышенной
,
в присутствии пыли и влажности; малость
потенциалов от ТермоЭДС.
2.Постоянство механических параметров:
- диаметра провода и шага намотки во времени и при изменении ;
- диаметра и формы каркаса во времени и при изменении ;
- постоянство и точность взаимного расположения каркаса и щетки;
- геометрических размеров преобразователя в эксплуатационных условиях (ускорения, давления)
Провод: реостатная проволока для точных преобразований подвергается волочению, отжигу в восстановительной атмосфере, чтобы избежать поверхностного окисления:
![]() ;
;
![]()
Защита – эмаль, оксидирование, которые должны быть прочные и эластичные, чтобы выдерживать намотку по граням с малым радиусом.
Должно легко паяться; омеднение и серебрение концов.
1.
Медно-никелевые сплавы (константан,
феррит, адванс…) - имеют низкий
![]() ;
высокая прочность, но ТермоЭДС высока;
;
высокая прочность, но ТермоЭДС высока;
2.
Никель-хромистые сплавы (нихром V)
– высокая
![]() ;
довольно низкий
;
R сильно зависит состояния
отжига; изготавливают с тонкой оксидной
пленкой; высокая прочность и предельные
;
довольно низкий
;
R сильно зависит состояния
отжига; изготавливают с тонкой оксидной
пленкой; высокая прочность и предельные
3. Никель-хром-железо (нихром) - дешевле 2. , но являются ферромагнитными; имеют более высокие ;
4. Серебряно-палладиевые – имеют более высокую коррозионную стойкость, меньшее контактное R
Виток - к витку или с шагом
Контактная дорожка – механической обработкой.
Каркас: Керамические, анодированный алюминий (допускают высокую плотность тока), феноловые смолы, эпоксидные смолы. Требуется очень чистая обработка поверхности.
Щетки:
контактное
давление
![]()
Достоинства:
1.Возможность
обеспечения линейности
![]() в большом диапазоне смещений (полный
или несколько оборотов);
в большом диапазоне смещений (полный
или несколько оборотов);
2.Работа на постоянном и переменном токе;
3.Высокая крутизна, возможность работы без усилителя;
4.Возможность построения функциональных Д.У.;
5.Малый вес, габариты;
6,Малая возмущаемость электромагнитными полями.
Недостатки:
1.Наличие трения;
2.Дискретность, зона нечувствительности;
3.Износ (маленький срок службы);
4.Шумы.