

20.Исполнительные устройства
Исполнительные устройства – устройства, предназначенные для введения управляющего автоматического регулятора на объект регулирования. Любое исполнительное устройство состоит из:
• Привода – исполнительного механизма,
• Регулирующего органа.
Исполнительные механизмы и регулирующие органы. Их виды
Исполнительный механизм предназначен для перемещения регулирующего органа. Под действием исполнительного механизма меняется площадь проходного сечения регулирующего органа, а следовательно и расход технологического потока. Обычно исполнительные устройства состоят из пневматического, электрического или гидравлического исполнительного механизма и регулирующего органа. Привод (исполнительный механизм) у
• Гидравлических устройств – поршень и цилиндр
• Электрических устройств – электродвигатель с редуктором
• Пневматических устройств – специальный механизм
В химической промышленности в автоматических системах часто используют пневматические мембранный и поршневой исполнительные механизмы, а в качестве регулирующих органов – регулирующий клапан и заслонку. Причины:
• Взрыво- и пожаробезопасность,
• Способность обеспечения полного открытия или полного закрытия регулирующего органа при аварийном прекращении подачи воздуха.
Пневматический регулирующий клапан, его устройство. Одно- и двуседельные клапаны, их применение. Клапаны типа НО и НЗ и их применение в технологических схемах.
П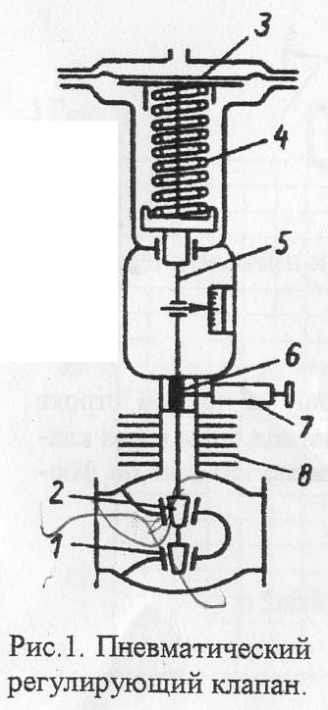
 невматические
регулирующие клапаны
(рис.1) предназначены для изменения
расхода вещества или энергии в
трубопроводе, на котором установлен
клапан. Прорезиненная мембрана 3 с
жестким центром, связанная со штоком
5, зажата между двумя крышками, образующими
в верхней части герметически закрытую
полость. Сжатый воздух от регулятора
подается в полость над мембраной и
перемещает ее вместе со штоком 5 вниз.
При этом пружина 4 жимается и уравновешивает
усилие, действующее на мембрану сверху.
При увеличении давления воздуха над
мембраной шток вместе с затвором 2
движется вниз и уменьшает проходное
сечение клапана, что вызывает снижение
расхода регулируемой среды. При уменьшении
давления воздуха затвор силой пружины
приподнимается и клапан открывается.
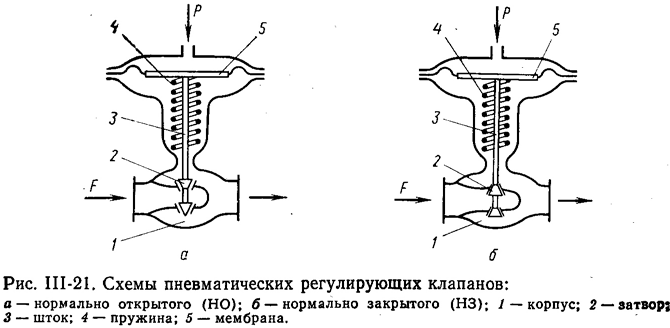
Пневматические регулирующие клапаны
выполняют нормально открытыми НО (с
прекращением подачи воздуха на мембрану
проходное сечение полностью открывается)
и нормально закрытыми НЗ, проходное
сечение которых закрывается. Клапаны
типа НО применяют в тех случаях, когда
при аварийном прекращении подачи
воздуха
на мембрану по технологическим условиям
более безопасно иметь открытую линию.
В противном случае устанавливают клапаны
типа НЗ. По виду запорного устройства
пары затвор - седло различают односедельные
и двухседельные клапаны, Первые имеют
неуравновешенный затвор и применяются
в исполнительных устройствах малых
Размеров при низких давлениях среды.
Двуседельные клапаны имеют почти
уравновешенный затвор, поэтому их
используют в исполнительных устройствах
больших размеров при высоких давлениях
среды.
невматические
регулирующие клапаны
(рис.1) предназначены для изменения
расхода вещества или энергии в
трубопроводе, на котором установлен
клапан. Прорезиненная мембрана 3 с
жестким центром, связанная со штоком
5, зажата между двумя крышками, образующими
в верхней части герметически закрытую
полость. Сжатый воздух от регулятора
подается в полость над мембраной и
перемещает ее вместе со штоком 5 вниз.
При этом пружина 4 жимается и уравновешивает
усилие, действующее на мембрану сверху.
При увеличении давления воздуха над
мембраной шток вместе с затвором 2
движется вниз и уменьшает проходное
сечение клапана, что вызывает снижение
расхода регулируемой среды. При уменьшении
давления воздуха затвор силой пружины
приподнимается и клапан открывается.
Пневматические регулирующие клапаны
выполняют нормально открытыми НО (с
прекращением подачи воздуха на мембрану
проходное сечение полностью открывается)
и нормально закрытыми НЗ, проходное
сечение которых закрывается. Клапаны
типа НО применяют в тех случаях, когда
при аварийном прекращении подачи
воздуха
на мембрану по технологическим условиям
более безопасно иметь открытую линию.
В противном случае устанавливают клапаны
типа НЗ. По виду запорного устройства
пары затвор - седло различают односедельные
и двухседельные клапаны, Первые имеют
неуравновешенный затвор и применяются
в исполнительных устройствах малых
Размеров при низких давлениях среды.
Двуседельные клапаны имеют почти
уравновешенный затвор, поэтому их
используют в исполнительных устройствах
больших размеров при высоких давлениях
среды.
21.Переходные процессы в системах регулирования
Изменение во времени выходной величины системы от момента нанесения возмущающего или задающего воздействий до прихода ее в равновесное состояние называют переходным процессом.
Показатели качества переходных процессов
К ачество
переходного процесса определяется по
показателям, которые характеризуют
отклонение реального процесса от
желаемого; они показывают насколько
точно и как быстро после нанесения
единичного ступенчатого воздействия
(при нулевых начальных условиях) в
системе устанавливается равновесное
состояние. Качество переходного процесса
количественно оценивается следующими
показателями (рис. 1-6).
ачество
переходного процесса определяется по
показателям, которые характеризуют
отклонение реального процесса от
желаемого; они показывают насколько
точно и как быстро после нанесения
единичного ступенчатого воздействия
(при нулевых начальных условиях) в
системе устанавливается равновесное
состояние. Качество переходного процесса
количественно оценивается следующими
показателями (рис. 1-6).
Статическая ошибка регулирования уст есть рассогласование между установившимся значением регулируемой величины после переходного процесса и ее заданным значением
уст = ут, - uз
или в относительных единицах уст = у - u (1.16)
Динамическая ошибка регулирования удин есть максимальное отклонение регулируемой величины в переходном процессе от ее заданного значения удин = ут,max – uз или в относительных величинах удин = уmax – u (1.17)
Время регулирования tp есть отрезок, в течение которого регулируемая величина достигает нового установившегося значения с некоторой заранее установленной точностью ±ε.
П еререгулирование
представляет собой максимальное
отклонение регулируемой величины
от установившегося значения, выраженное
в процентах, от уст
еререгулирование
представляет собой максимальное
отклонение регулируемой величины
от установившегося значения, выраженное
в процентах, от уст
П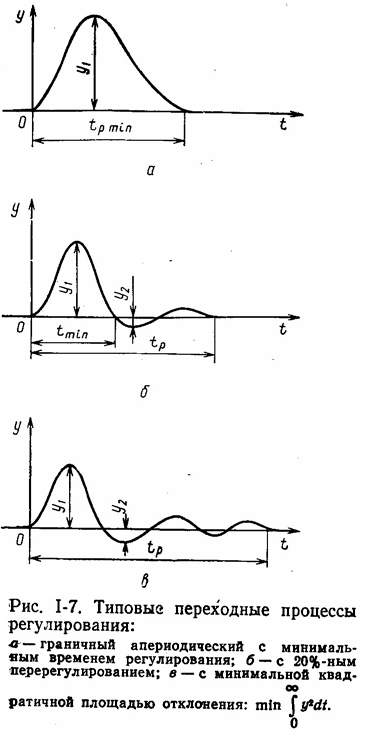 ри
расчетах автоматических систем
регулирования технологических
процессов перерегулирование переходного
процесса оценивают также выраженным в
процентах отношением второй и первой
амплитуд колебаний, направленных в
противоположные стороны.
ри
расчетах автоматических систем
регулирования технологических
процессов перерегулирование переходного
процесса оценивают также выраженным в
процентах отношением второй и первой
амплитуд колебаний, направленных в
противоположные стороны.
И нтегральная
квадратичная ошибка
регулирования представляет собой
квадрат площади между кривой переходного
процесса и новым установившимся
состоянием системы:
нтегральная
квадратичная ошибка
регулирования представляет собой
квадрат площади между кривой переходного
процесса и новым установившимся
состоянием системы:
Чем меньше статическая и динамическая ошибки, время регулирования и т. д., тем выше качество переходного процесса.
Типовые переходные процессы и их характеристика
 Т
Т иповые
переходные
процессы. Из
устойчивых переходных процессов в
качестве оптимального с точки зрения
требований технологии выбирают один
из трех типовых процессов: граничный
апериодический процесс с минимальным
временем регулирования tp,min
(рис. 1-7,а); процесс с 20%-ным перерегулированием
(рис. 1-7,6); процесс с минимальной
квадратичной площадью отклонения (рис.
1-7, в)
иповые
переходные
процессы. Из
устойчивых переходных процессов в
качестве оптимального с точки зрения
требований технологии выбирают один
из трех типовых процессов: граничный
апериодический процесс с минимальным
временем регулирования tp,min
(рис. 1-7,а); процесс с 20%-ным перерегулированием
(рис. 1-7,6); процесс с минимальной
квадратичной площадью отклонения (рис.
1-7, в)
Граничный апериодический процесс характеризуется отсутствием перерегулирования, минимальным общим временем регулирования и наименьшим по сравнению с другими типовыми переходными процессами воздействием регулятора на объект (это наименьшее воздействие вызывает наибольшее отклонение регулируемой величины от заданного значения). Такой переходный процесс используется в качестве оптимального при значительном влиянии регулирующего воздействия на другие технологические величины объекта при отклонении основной регулируемой величины для того, чтобы свести их отклонение к минимуму.
Процесс с 20%-ным перерегулированием, характеризуется большей величиной регулирующего воздействия, чем в предыдущем случае, и меньшим отклонением процесс выбирается в качестве оптимального в случаях, когда допустимо некоторое перерегулирование.
Процесс с минимальной квадратичной площадью отклонения регулируемой величины обладает значительным (до 40%) перерегулированием, большим временем регулирования и наименьшей величиной максимального динамического отклонения регулируемой величины. Он имеет место при большей по сравнению с описанными выше процессами величине регулирующего воздействия и применяется в качестве оптимального, если величина динамического отклонения параметра должна быть