

Проектирование кривошипно-коромыслового нитепритягивателя
Задачей проектирования является определение длины коромысла нитепритягивателя, которая обеспечивала бы заданную величину подачи нити и построение диаграммы подачи нити спроектированного нитепритягивателя.
Исходные данные на проектирование (рис. 9)
Вар. |
,мм |
АВ,мм |
ВС,мм |
СД,мм |
X,мм |
Y,мм |
|
|
|
1 |
125 |
17 |
23 |
30 |
12 |
30 |
65 |
130 |
240 |
2 |
150 |
18 |
28 |
35 |
22 |
20 |
50 |
130 |
240 |
3 |
130 |
16 |
25 |
30 |
12 |
28 |
60 |
150 |
240 |
4 |
170 |
18 |
30 |
35 |
20 |
22 |
60 |
135 |
240 |
5 |
140 |
17 |
24 |
32 |
15 |
25 |
60 |
130 |
240 |
6 |
135 |
17 |
26 |
35 |
16 |
28 |
60 |
120 |
240 |
7 |
150 |
18 |
32 |
30 |
18 |
24 |
65 |
130 |
240 |
8 |
155 |
18 |
30 |
32 |
20 |
25 |
60 |
120 |
240 |
где - максимальная величина подачи нити,
АВ – радиус кривошипа,
ВС – длина шатуна,
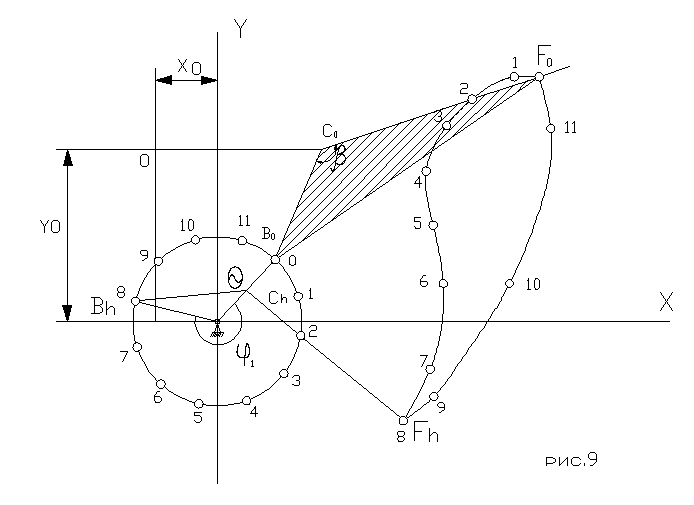
Х, У – координаты точки Д.
- угол, определяющий положение механизма для крайнего верхнего положения глазка нитепритягивателя.
- угол между шатуном и рычагом нитепритягивателя,
- угол поворота кривошипа, при котором происходит подача нити.
При проектировании необходимо определить длину рычага CF и построить диаграмму подачи нити заданного механизма.
Последовательность проектирования
Строим начальное положение механизма для заданного угла , которое должно соответствовать крайнему верхнему положению глазка нитепритягивателя.
По заданному строим крайнее нижнее положение рычага CF нитепритягивателя.
Задаемся произвольно длиной CF и по крайним положениям т.F определяем
 .
Если это значение не соответствует
заданному, то последовательно перемещая
т.F по линии CF
находим ее такое положение, которое
удовлетворяет
заданному.
.
Если это значение не соответствует
заданному, то последовательно перемещая
т.F по линии CF
находим ее такое положение, которое
удовлетворяет
заданному.Строим шаблон рычага BCF и вырезаем его на бумаге. Построение ведется в масштабе чертежа.
Разбиваем окружность радиуса АВ на 12 частей, начиная от т. . Находим положение точек
 .
.Последовательно прикладываем шаблон до совмещения т. В и т. С шаблона с другой радиуса ДС. Отмечаем положение т. F на чертеже. Получаем 12 положение точек F.
Соединяем точки
 плавной кривой. Получаем траекторию
движения т F до плоскости.
Уточняем значение угла
начального положения механизма.
плавной кривой. Получаем траекторию
движения т F до плоскости.
Уточняем значение угла
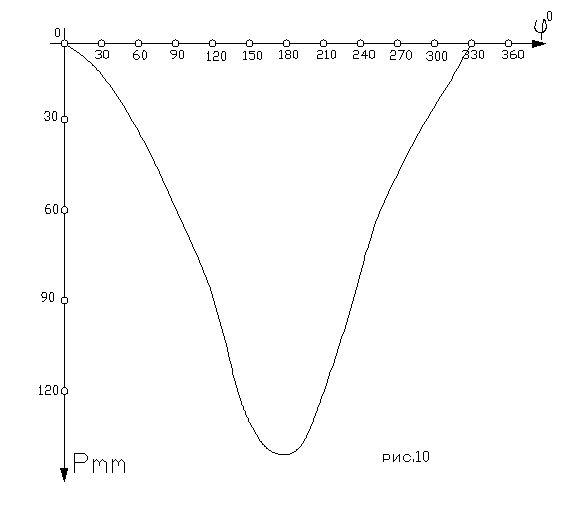
начального положения механизма.Строим ДПН в координатах P и (рис. 10) откладывая последовательно удвоенные отрезки
 в функции от
.
в функции от
.Соединяем полученные точки плавной кривой, которая и будет представлять ДПН спроектированного механизма.