

Однородные системы линейных уравнений. Теорема о существовании фундаментальной системы решений.
Определение:
Линейно-независимая
система решений
 ОСЛУ
называется фундаментальной если каждое
решение ОСЛУ является комбинацией этих
решений.( Совокупность max
числа линейно-независимых решений
называется фундаментальной системой
решений).
ОСЛУ
называется фундаментальной если каждое
решение ОСЛУ является комбинацией этих
решений.( Совокупность max
числа линейно-независимых решений
называется фундаментальной системой
решений).
Теорема:
Если
 то ОСЛУ обладает ФСР.
то ОСЛУ обладает ФСР.
Доказательство:
Пусть
и пусть для определенности минор Mr≠0
расположен в левом верхнем углу матрицы
А. Перенесем слагаемые содержащие
свободные неизвестные xr+1…xn
в правую
часть уравнения получим систему:
 .
.
Придавая
свободным неизвестным значения
 мы из системы (2) получим
мы из системы (2) получим
 .
Это дает нам строку-решение
.
Это дает нам строку-решение
 .
Затем придавая свободным неизвестным
значения (0,1,0…0) получим
.
Затем придавая свободным неизвестным
значения (0,1,0…0) получим
 .
Это дает нам строку-решение
.
Это дает нам строку-решение
 и т.д. Продолжая этот процесс мы найдем
всего k=n-r
решений:
и т.д. Продолжая этот процесс мы найдем
всего k=n-r
решений:
 .
Эти n-r
решений независимы т.к. ранг образованной
ими матрицы имеет ранг n-r
решений.
.
Эти n-r
решений независимы т.к. ранг образованной
ими матрицы имеет ранг n-r
решений.
Покажем теперь что решения е1,е2… еn-r образуют ФСР. Согласно определению ФСР для этого надо показать что каждое решение ОСЛУ можно представить в виде линейной комбинации решений е1,е2…еn-r.
Пусть
 -
произвольное решение ОСЛУ. Рассмотрим
строку
-
произвольное решение ОСЛУ. Рассмотрим
строку
 .
Легко видеть что все элементы стоящие
на последних n-r
местах этой строки е0
будут равны 0, т.е.
.
Легко видеть что все элементы стоящие
на последних n-r
местах этой строки е0
будут равны 0, т.е.
 .
Т.к. е0
линейная
комбинация решений то строка е0
сама будет
решением ОСЛУ. А т.к. значение всех
свободных неизвестных в строке е0=0
то из однородности в этом случае системы
(2) определитель которой отличен от 0,
получаем что и значение всех неизвестных
в е0=0,
т.е. е0
есть 0 строка. Отсюда следует что
.
Т.к. е0
линейная
комбинация решений то строка е0
сама будет
решением ОСЛУ. А т.к. значение всех
свободных неизвестных в строке е0=0
то из однородности в этом случае системы
(2) определитель которой отличен от 0,
получаем что и значение всех неизвестных
в е0=0,
т.е. е0
есть 0 строка. Отсюда следует что
 (ч.т.д.)
(ч.т.д.)
Таким
образом можно сказать что общее решение
ОСЛУ имеет вид
 где е1,е2…еn-r
- ФСР, а
С1,С2…Cn-r
– произвольные числа.
где е1,е2…еn-r
- ФСР, а
С1,С2…Cn-r
– произвольные числа.
№19-дописать-------------------------------------------------------------
Теорема о связи между решениями неоднородных и соответствующих однородных систем.
Важно
отметить: Общее решение неоднородной
СЛУ равно сумме общего решения
соответствующей ОСЛУ и произвольного,
но фиксированного решения СЛУ. Отсюда
следует, что если е1,е2…еn-r
- ФСР ОСЛУ
и е0
- произвольное фиксированное решение
СЛУ, то общее решение СЛУ имеет вид
 ,
где С1,С2…Cn-r
– произвольные числа.
,
где С1,С2…Cn-r
– произвольные числа.
Сформулированное утверждение следует из следующих очевидных утверждений:
1) Сумма любого решения неоднородной СЛУ и любого решения соответствующей ей ОСЛУ является решением неоднородной СЛУ.
2) Разность двух произвольных решений неоднородной системы двух уравнений является решением соответствующей ОСЛУ.
№20---------------------------------------------------------------------------
Линейные операции над векторами и их свойства. Доказать одно из них.
Определение: вектор - это направленный отрезок.
Будем обозначать вектор AB . А - начало вектора, В - конец вектора. |AB| означает длина вектора (символ модуля).Вектор называется нулевым, если его начало и конец совпадают.
Определение: Два вектора называются компланарными, если они лежат в одной плоскости или на параллельных плоскостях.
Определение: Два вектора называются коллинеарными, если они лежат на одной прямой или на параллельных прямых.
Определение: Пусть вектор AB и вектор A1B1 коллинеарны и пусть плоскость π пересекает прямые на которых они лежат. Плоскость π разбивает все пространство на два полупространство. Если перемещаясь по прямым в направление векторов AB и A1B1 мы попадем в одно полупространство(разные) то векторы AB и A1B1 называются одинаковонаправл. (противоположнонаправленными).
Определение: Два вектора называются равными, если они коллинеарны, имеют одинаковую длину и направление. Два нулевых вектора считаются равными.
Из
определения равенства векторов следует,
что мы не различаем двух равных векторов,
имеющих разные точки приложения. Иными
словами, точка приложения вектора
 может быть произвольной. В соответствии
с этим векторы в геометрии называются
свободными.
может быть произвольной. В соответствии
с этим векторы в геометрии называются
свободными.
Элементы множества могут находиться в некоторых отношениях между собой. Отношения между парами объектов называются бинарными (двойными). Примером бинарных отношений является равенство. Отношение равенства между векторами обладает следующими свойствами :
1)
 - рефлексивность.
- рефлексивность.
2)
 - симметричность.
- симметричность.
3)
Если
 ,
, то
то
 - транзитивность.
- транзитивность.
Бинарное отношение которое рефлексивно симметрично и транзитивно называется соотношением эквивалентности, таким образом отношение равенства векторов является отношением эквивалентности.
Линейными называются операции сложения и умножения вектора на число.
Сложение:
Суммой
 двух векторов
двух векторов
 называется
вектор, идущий из начала вектора
называется
вектор, идущий из начала вектора
 в конец вектора
в конец вектора
 при условии, что начало
приложено к концу вектора
при условии, что начало
приложено к концу вектора
 .
.
Правило построения суммы 2-х векторов называется правилом треугольника:
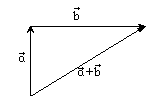 a,b-вектора
a,b-вектора
Правило
параллелограмма:
От точки А
отложим
 и
,
построим параллелограмм, тогда вектор
диагональ с началом в точке А является
суммой
и
,
построим параллелограмм, тогда вектор
диагональ с началом в точке А является
суммой
 и
.
и
.
Определение: Произведение а на вещественное число называется b удовлетворяющее следующему условию:
1) = *
2)

3)
 ,если
>0
,если
>0
4) ,если <0