

Практикуемая математическая модель пространственной засечки
В предыдущем параграфе была рассмотрена модель и ее решение на случай, когда всевозможные погрешности измерений, которые порождаются влиянием атмосферы и погрешностями часов на спутнике и приемнике отсутствуют.
В практике же данные погрешности принимаются в виде составляющих самих величин псевдодальностей и геометрических дальностей. Иными словами они вводятся в уравнения в явном виде.
Поправки за данные погрешности можно учесть с использованием моделей погрешностей, определить их в качестве дополнительных неизвестных в процессе решения переопределенной системы уравнений, можно на некотором этапе искусственно исключить их. Одно при этом остается неизменным фактом – они реально воздействуют на результаты измерений и необходимо тем или иным образом их учитывать.
С учетом сказанного далее приведем детализированную модель пространственной засечки в виде соотношения измеряемых псевдодальностей и геометрических дальностей.
Это те же уравнения поправок, которые рассмотрены в предыдущем параграфе с тем отличием, что далее в них используются обозначения, принятые в литературе по космической геодезии с детализацией этих уравнений дополнительными элементами в виде поправок и неизвестных. Поправки как правило определяются по математическим моделям, а дополнительные неизвестные могут быть добавлены в уравнения по мере необходимости.
В
спутниковых технологиях используются
измерения двух видов величин:
псевдодальности и фазы. Псевдодальность
![]() –
это расстояние между спутником i и
приемником A, получаемое при умножении
значения скорости света с
на измеренную по показаниям часов
спутника и приемника временную задержку
в распространении сигнала. Эта задержка
искажена ошибками в показаниях часов,
влиянием среды распространения,
задержками
в аппаратуре спутника и приемника и
другими факторами, которые в аналитическом
представлении задачи рассмотрим, а в
практических вычислениях для простоты
рассмотрения опустим. Псевдодальности
измеряются по сигналам точного кода на
частотах диапазонов L1 и L2 и по сигналам
стандартного кода на диапазоне L1.
–
это расстояние между спутником i и
приемником A, получаемое при умножении
значения скорости света с
на измеренную по показаниям часов
спутника и приемника временную задержку
в распространении сигнала. Эта задержка
искажена ошибками в показаниях часов,
влиянием среды распространения,
задержками
в аппаратуре спутника и приемника и
другими факторами, которые в аналитическом
представлении задачи рассмотрим, а в
практических вычислениях для простоты
рассмотрения опустим. Псевдодальности
измеряются по сигналам точного кода на
частотах диапазонов L1 и L2 и по сигналам
стандартного кода на диапазоне L1.
Воспользуемся моделью псевдодальности в упрощенном виде.
![]() (3.1)
(3.1)
где
t – номинальное время приема (системное
время, время GPS или ГЛОНАСС);
![]() –
ионосферная задержка;
–
ионосферная задержка;
![]() –
тропосферная задержка; dti
и dtA
– поправки часов спутника и приемника;
–
тропосферная задержка; dti
и dtA
– поправки часов спутника и приемника;
![]() –
геометрическая дальность;
–
геометрическая дальность;
![]() –
погрешность измерения псевдодальности,
имеющая порядок одного метра и более
(шум измерений псевдодальности). В левой
части уравнения (3.1) находятся измеренные
или известные с некоторыми погрешностями
величины.
–
погрешность измерения псевдодальности,
имеющая порядок одного метра и более
(шум измерений псевдодальности). В левой
части уравнения (3.1) находятся измеренные
или известные с некоторыми погрешностями
величины.
Упрощенную модель фазовых измерений можно представить в виде выражения.
![]() (3.2)
(3.2)
Здесь
![]() –
погрешность измерения фазы или шум
измерений. Он имеет порядок 1 – 2 мм,
откуда видно, что фазовые измерения
значительно точнее кодовых,
–
погрешность измерения фазы или шум
измерений. Он имеет порядок 1 – 2 мм,
откуда видно, что фазовые измерения
значительно точнее кодовых,
![]() .
.
С
использованием фазовых измерений
измеренная спутниковым приемником в
момент первого наблюдения фаза
![]() равна
разности между фазой принятого от
спутника сигнала несущей волны и сигнала,
созданного в приемнике. Когда сигнал
спутника принимается, может измеряться
только дробная часть фазы, то есть целое
число волн
равна
разности между фазой принятого от
спутника сигнала несущей волны и сигнала,
созданного в приемнике. Когда сигнал
спутника принимается, может измеряться
только дробная часть фазы, то есть целое
число волн
![]() ,
называемое начальной неоднозначностью
фазы, неизвестно. При последующих
наблюдениях приемником дополнительно
фиксируется число целых циклов частоты,
накопленных от начального наблюдения.
Фазу
,
называемое начальной неоднозначностью
фазы, неизвестно. При последующих
наблюдениях приемником дополнительно
фиксируется число целых циклов частоты,
накопленных от начального наблюдения.
Фазу
![]() в
циклах выражают в единицах расстояния
умножением на длину волны.
в
циклах выражают в единицах расстояния
умножением на длину волны.
Уравнения (3.1), (3.2) как математические модели определяют связь псевдодальностей, которые можно получить непосредственно, с истинной геометрической дальностью. Их соотношение определяется прежде всего поправочными элементами погрешностей. И если будет известно их значение вместе с измеренной псевдодальностью, то задача определения самой геометрической дальности будет решена. Совокупность геометрических дальностей можно использовать для решения пространственной засечки. В этом заключается прямое решение задачи местоопределения наземного пункта. Однако такой подход приемлем в том, случае, если в наличии имеются необходимые измерения. Это даст однозначное значение местоопределения, но с соответствующей точностью, которая не сможет удовлетворить подавляющую массу потребностей. Поэтому необходимо использовать как можно больше избыточных измерений, что влечет за собой извлечение окончательного результата с вероятностных позиций.
Но обязательным условием данного решения является наличие математического аппарата на решение этой задачи. Как правило, подобный аппарат реализуется путем линеаризации уравнений (3.1) и (3.2), что и было достигнуто в предыдущем параграфе.
Далее так же как и в предыдущем параграфе для обобщенной модели приведем необходимые выкладки решения задачи.
Для кодовых измерений (абсолютные местоопределения) будет справедливо выражение, которое уже получено выше (3.1)
![]()
Здесь
геометрическая дальность
![]() это та же исходная функция, которая
линеализируется и рассмотрена выше.
По ней составлена система уравнений
поправок (3.2.4).
это та же исходная функция, которая
линеализируется и рассмотрена выше.
По ней составлена система уравнений
поправок (3.2.4).
Напомним, эти уравнения как и в параметрическом способе имеют следующий вид:
![]() ,
в котором
,
в котором
 соответсвуют выражению (3.2.3)
соответсвуют выражению (3.2.3)
Представим (3.1) в ином виде,- в виде выражения связи псевдодальности с геометрической дальностью:
![]() (3а)
(3а)
Геометрическую
дальность
![]() линеализируем разложением в ряд Тейлора
и подставляем обратно в (3а).
линеализируем разложением в ряд Тейлора
и подставляем обратно в (3а).
![]() (3.8)
(3.8)
или
![]()
где
![]() - сумма производных, которые еще называются
направляющими косинусами,
- сумма производных, которые еще называются
направляющими косинусами,
![]() - свободный член
уравнения поправки (3.8) как разность
между известным значением геометрической
дальности и псевдодальности.
- свободный член
уравнения поправки (3.8) как разность
между известным значением геометрической
дальности и псевдодальности.
После введения дополнительных обозначений данное уравнение можно представить короче:
![]() (3в)
(3в)
где
![]() - суммарная поправка
за искажения атмосферы и часов,
определяемая по модельным данным и
часам.
- суммарная поправка
за искажения атмосферы и часов,
определяемая по модельным данным и
часам.
Для множества измерений составляется система уравнений (3.в)
![]()
и так же как задача предыдущего параграфа решается по методу наименьших квадратов параметрическим способом с тем отличием, что здесь в системе присутствуют дополнительные элементы, присущие практическим задачам.
Для фазовых измерений:
![]() (3.9)
(3.9)
Таким образом, одновременные наблюдения не менее, чем четырех спутников GPS (рис. 3), позволяют определить и координаты пункта и время. Описанный метод определений координат называется абсолютным методом. Точность этого метода обычно невысокая и составляет в среднем 50 -100 м.
В
дифференциальном методе одно и то же
созвездие спутников наблюдают не менее
двух приемников (рис. 4). Один из них,
базовый, находится в точке с известными
истинными координатами ![]() и
непрерывно определяет свои координаты
и
непрерывно определяет свои координаты ![]() по
псевдодальностям. Разность истинных и
измеренных координат базового приемника
дает значение дифференциальной поправки:
по
псевдодальностям. Разность истинных и
измеренных координат базового приемника
дает значение дифференциальной поправки:
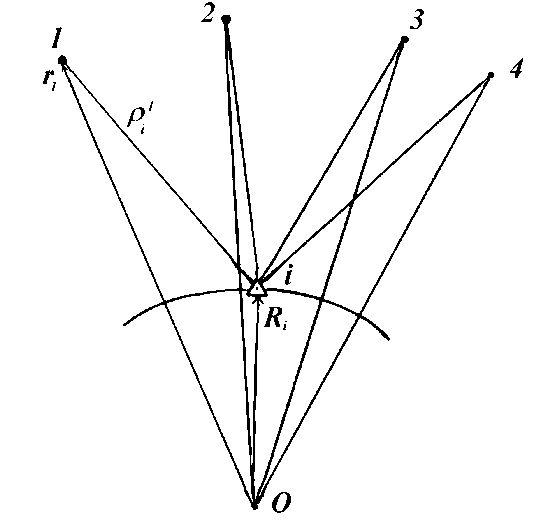
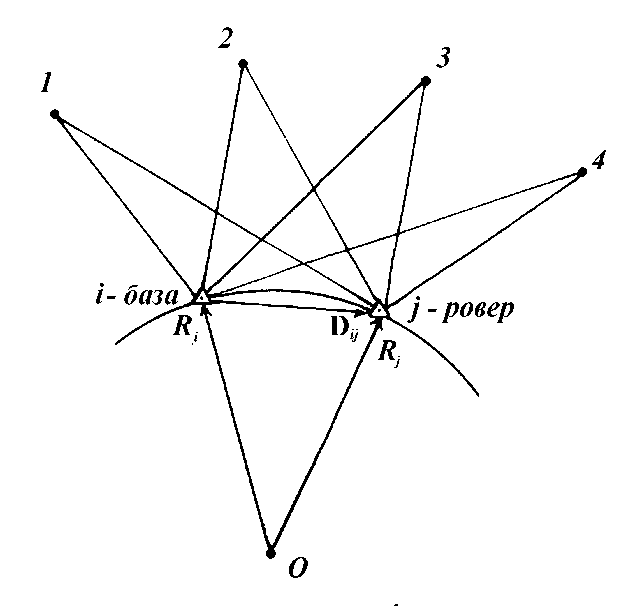
Рис.
3. Абсолютный метод Рис. 4. Дифференциальный
метод
![]() .
(33)
Полевой
приемник (ровер) находит свои координаты
.
(33)
Полевой
приемник (ровер) находит свои координаты ![]() по
тем же спутникам и, используя
дифференциальную поправку, исправляет
их:
по
тем же спутникам и, используя
дифференциальную поправку, исправляет
их:
![]() .
(34)
Точность
измерений будет тем выше, чем сильнее
будут коррелированы ошибки измерений.
В
фазовых геодезических приемниках
измеряется не только псевдодальность,
но и разность фаз
.
(34)
Точность
измерений будет тем выше, чем сильнее
будут коррелированы ошибки измерений.
В
фазовых геодезических приемниках
измеряется не только псевдодальность,
но и разность фаз ![]() на
частоте несущей между принятым сигналом
и сигналом, созданным в приемнике.
Точность фазовых измерений значительно
выше, чем кодовых, относительная ошибка
стороны обычно получается на уровне
10-6 и
меньше.
на
частоте несущей между принятым сигналом
и сигналом, созданным в приемнике.
Точность фазовых измерений значительно
выше, чем кодовых, относительная ошибка
стороны обычно получается на уровне
10-6 и
меньше.