

Раздел 2 Методы определения местоположения, измерений и вычислений в спутниковых системах Геометрическая сущность местоопределения.
В
системах спутникового позиционирования
КА выполняют роль геодезических опорных
пунктов. На каждый момент измерений их
координаты должны быть известны.
Координаты объекта находят способом
засечек по измерениям при помощи
аппаратуры на спутниках и на земле.
Измеренные параметры определяют
поверхности положения, в точке пересечения
которых лежит искомый объект. В системе
первого поколения TRANSIT на основе эффекта
Доплера измеряли разности расстояний
от приемника до двух поло-жений спутника
на орбите. Поверхностями положений
являлись гиперболоиды вращения. В
современных системах измеряют дальности
до КА и скорости изменений дальностей
вследствие перемещений ИСЗ относительно
пользователя. Измеренным скоростям
соответствуют конические поверхности
положения (конусы), а измеренным дальностям
- сферические (сферы). В геодезических
целях преимущественно пользуются
дальностями, по которым реализуют
пространственные линейные засечки
(рис.
1).
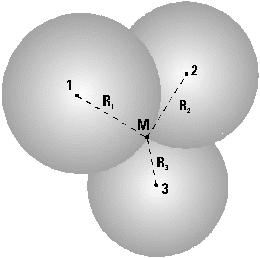 Рис.
1.
Линейная пространственная засечка.
M
- точка пересечения сфер с центрами 1, 2
, 3 и
радиусами
R1,
R2, R3
Рис.
1.
Линейная пространственная засечка.
M
- точка пересечения сфер с центрами 1, 2
, 3 и
радиусами
R1,
R2, R3
Если с определяемого пункта M измерить расстояния R1, R2, R3 до трех пунктов 1, 2, 3, провести из них как из центров радиусами R1, R2, R3 сферы, то эти сферы пересекутся в точке M и определят ее положение. Сферы пересекутся еще в одной точке - M' (на рис. 1 не показана), однако точки M и M' лежат по разные стороны плоскости "123" и сделать правильный выбор нетрудно. В этом заключается геометрическая сущность задачи. Когда известны координаты спутников, задачу легко решить аналитически и вычислить координаты пункта M. На деле измеряют искаженные расстояния. Их называют псевдодальностями. Чтобы правильно вычислить координаты пункта по псевдодальностям, надо их измерять не до двух или трех, а, как увидим позже, до большего числа спутников с известными координатами. Кроме того, как это принято в геодезии, всегда должны быть избыточно измеренные величины. Избыточные результаты повышают качество определений, ибо обеспечивают контроль и позволяют выполнять обработку по методу наименьших квадратов (МНК).
-
основное это расстояния от спутника до приемника, далее работает пространственная засечка
формула:
![]() ,
где (2.2)
,
где (2.2)
![]() - топоцентрическое
удаление спутника от приемника,
- топоцентрическое
удаление спутника от приемника,
![]() -
отклонение показаний часов приемника
и спутника от эталона,
-
отклонение показаний часов приемника
и спутника от эталона,
![]() - временные задержки за влияние атмосферы.
- временные задержки за влияние атмосферы.
![]() - для каждого
спутника определяется и передается со
спутника наземными станциями слежения.
На фоне грубых кодовых измерений она
может считаться известной.
- для каждого
спутника определяется и передается со
спутника наземными станциями слежения.
На фоне грубых кодовых измерений она
может считаться известной.
![]() определяется на
основе моделирования.
определяется на
основе моделирования.
Таким образом в уравнении получается 4 неизвестных, - координаты приемника и его временная задержка.
Разновидности методов определения местоположения
-
Абсолютные методы.
Выполняются по принципу трилатерации с использованием кодовых измерений на импульсном методе измерений. Предполагают использование поправок за влияние атмосферы и хода часов на спутниках и приемниках.
По той причине, что поправки имеют ограниченную точность, точность абсолютных определений так же не велика в пределах 30 метров.
Приведем погрешности, характерные для абсолютного метода.
На определение положения приемника в абсолютном методе определения местоположения будут влиять следующие погрешности.
|
№ п.п. |
Источник погрешностей |
Величина погрешности абсолютных определений, характерная для С/Ф кода, м |
|
1 |
Ионосфера |
7 |
|
2 |
Тропосфера |
0,7 |
|
3 |
Многопутность |
1,2 |
|
4 |
Шумы приемника |
1,5 |
|
5 |
Погрешность координатно-временного обеспечения спутников |
3,6 |
|
|
Суммарная погрешность |
8,1 |
Пороговая чувствительность метода – 3 метра. Из-за перечисленных ошибок эта точность оказывается не доступной в данном методе. И даже разрешение неоднозначности не доступно.
Дальнейшее повышение точности – дифференциальными методами обработки измерений
-
дифференциальные (кинематика)
Основаны на том же принципе, что и абсолютные методы, но помимо импульсного метода измерений могут использоваться и фазовые. Предполагают введение и учет поправок за атмосферное влияние, но не в абсолютных значениях а в относительных между базовым и роверным приемниками.
-
Относительные являются в определенной степени частным случаем дифференциальных с тем различием, что поправки в положение роверного приемника учитываются не в реальном режиме времени, а в процессе постобработки