

Общие принципы построения глобальных систем позиционирования
-
космический сектор
-
сектор управления и контроля
-
сектор потребителя
Космический сектор
-
спутники
-
аппаратура на спутниках
-
применение двух видов закодированных сигналов: общедоступного грубого кода (С/А – кода) с разрешением в несколько десятков метров и санкционированного точного кода (Р-кода). Генерируются высокостабильными опорными генераторами.
-
Назначение несущих колебаний
-
определение навигационного положения
-
вспомогательная величина для выполнения фазовых измерений при решении неоднозначности
-
-
-
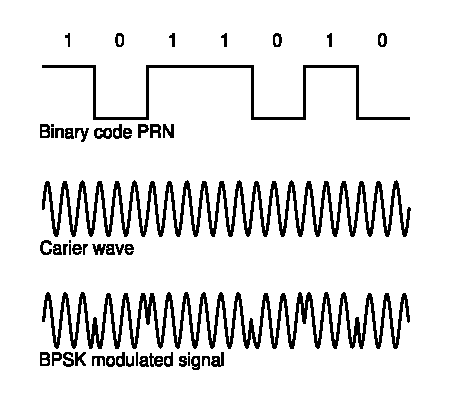
несущие колебания модулируются как грубыми так и точными кодовыми сигналами
-
модулированию подвергаются обе частоты
-
L1 обоими кодами
-
L2 только сигналами Р-кода
-
модулирование фазовое
-
опорные генераторы
-
принцип формирования кодовых последовательностей пример.xls
-
формирование навигационного сообщения
-
кадр из 5 субкадров. 1 кадр – признаки отождествления и работоспособности спутника, поправки часов, календарный отсчет времени.
-
2, 3 субкадр эфемеридный ряд с поправками к кеплеровым орбитам
-
В 4- м для военных, часть поправки за ионосферу и данные альманаха.
-
В 5-м –альманах и статус работоспособности спутников.
-
-
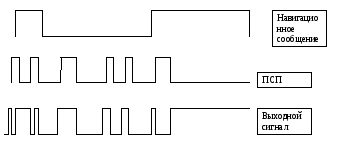
методы объединения и формы передачи радиосигналов со спутника
-
объединение выполняется на основе бинарного суммирования раздельно для Р и С/А кодов.
-
Суммирование с использованием сумматоров так же как и формирование ПСП
-
Трудность не в формировании таких наложений ПСП и навигационного сообщения, а в их разделении
-
Разделение основывается на точном знании структуры ПСП как на спутнике, так и в приемнике. Если в приемнике выполнить вычитание (сложение) из полученного сигнала опорного ПСП, то в результате получится сигнал навигационного сообщения. Здесь трудность только в том, чтобы плавным смещением опорного сигнала достигнуть той точки сопряжения входного и опорного сигналов, которая соответствует одной и той же временной метке. Достигается это методом максимальной корреляции. Максимальная корреляция принципиальных трудностей не вызывает в силу того, что длительность такта навигационного сообщения 20мс, а такта псевдопоследовательности 1-2 мкс, всего псевдопоследовательность по коду С/А содержит 1024 бита.
-
-
-
Далее бинарное парафазное модулирование сигнала несущей частоты.
Здесь уместно изучить принципы формирования ПСП с использованием генератора, построенного на регистрах и сумматоре по изданию Серапинаса стр. 30.
Сектор управления и контроля (кратко о функциях) Сектор потребителя
-
приемно-вычислительный комплекс
-
военно-прикладной аспект
-
гражданский аспект
-
навигация
-
геодезия
-
-
-
Функции и структура
-
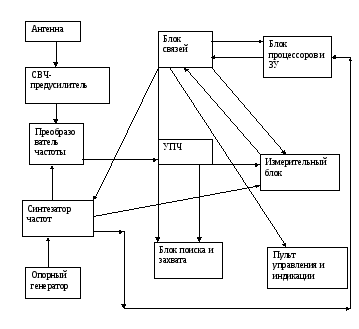
Структурное представление приемника:
-
Прием радиосигналов с антенны через СВЧ-усилитель на преобразователь частот
-
В это же время с опорного генератора через синтезатор частот на преобразователь подается спектр опорных частот. При этом синтезатор контролируется блоком связей.
-
С преобразователя совокупность принятого и опорного сигналов поступает в блок поиска и захвата и одновременно в измерительный блок.
-
Блок поиска контролирует сопоставимые частоты
-
Измерительный блок сопоставляет задержки и с учетом вычисляемых поправок определяет дальности, затем грубое местоположение
-
-
-
-
Функции приемника
-
Определение регистрируемых величин
-
Предварительная обработка результатов непосредственно на пункте средствами приемника
-
Постобработка
-
Непосредственно на пункте
-
Селекция и захват спутника
-
Демодуляция и декодирование
-
Расшифровка навигационного сообщения
-
Текущее управление наблюдениями
-
Предварительная обработка и управление хранением информации
-
Контроль за работоспособностью с самодиагностикой всего комплекса
-
Разделение фазомодулированных сигналов на кодовые, гармонические с выделением навигационного сообщения
-
Кодовые сигналы используются для определения грубого местоположения по дальностям, вычисления различных поправок.
-
Фазовые измерения просто сглаживаются и сырыми запоминаются для дальнейшей постобработки
-
-
-
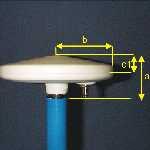
Антенны
-
Диаграмма направленности;
-
полусферичная равномерность диаграммы обеспечивается микрополосковой конструкцией (печатная плата из отдельных элементов с соответсвтующим фазированием)
-
Для геодезических приемников уклонение реальной фазовой характеристики 5-100, что соответствует 3-5 мм погрешности
-
фазовый центр
-
фиктивное и стабильное положение в пространстве относительно точки относимости
-
удерживается в целом на миллиметровом уровне и учитывается как константа
-
-
-
Ngs –файлы
;PCT converted from ant_info.002 <MLM-99/04/07-60
;ASH 700228.A ORIGINAL ASHTECH L1/L2 NGS ( 1) 98/06/02
;
;Mean phase center (mm) North East Up
L1NominalOffset = -2.9 0.8 16.7
L2NominalOffset = -2.4 6.1 11.3
;Elevation range (deg) Start Stop Step
ElevationRange = 5 90 5
;Azimuth step size (deg)
AzimuthStep = 0
;Azimuth/elevation corrections (mm)
AZ=0
;L1
0.0 -4.0 -2.1 -0.6 0.4 1.2 1.7 2.0 2.1 2.0
1.9 1.7 1.5 1.3 1.0 0.7 0.4 0.0
;L2
0.0 -1.1 -1.9 -2.1 -1.9 -1.6 -1.2 -0.9 -0.7 -0.7
-0.9 -1.2 -1.5 -1.9 -2.1 -2.0 -1.4 0.0
-
меры устранения многолучевости
-
максимальная чувствительность для прямых сигналов
-
экранирование нижней части антенны
-
-
селекция сигналов от разных спутников
-
селекция кодовых сигналов
-
селекция обеспечивается использованием каналов по числу спутников
-
В ГЛОНАСС используется частотная селекция. Каждый спутник излучает свою частоту. Это усложняет задачу разрешения неоднозначности. В GPS другой подход, нестандартный.
-
В GPS частоты сигналов от всех спутников одни, но кодовая информация разная. Поэтому разделение – кодовое (структурная селекция).
-
-
Структурная схема организации селекции приведена ниже
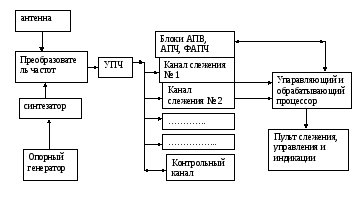
-
Разделение частот L1 по коду c/a, частот L2 по коду Р
-
В структурной селекции используется корреляционный принцип сравнения принимаемого и формируемого на месте сигналов в корреляционных перемножителях. Если корреляция высокая, то перемноженные сигналы дают резкое возрастание результата. Это свидетельство высокой вероятности совпадения и основание для идентификации поступившего сигнала с конкретным спутником.
-
Перемножение можно выполнить с использованием плавной автоподстройки временной задержки сигнала (АПВ).
-
А АВП параллельно дает время прохождения сигнала от спутника и возможность определения псевдодальности
-
Гармонические сигналы от всех спутников одной частоты, что делает затруднительным разделить их так же как кодовые. Поэтому здесь используется частотное разделение
-
Сначала они очищаются от кодовых и навигационного сообщения
-
Далее используется частотная селекция на основе эффекта Доплера, что возможно благодаря разной удаленности спутников от приемника. Точнее разнонаправленности орбит и движения спутников относительно приемника.
-
-
Поиск, захват и отслеживание спутников
-
Принцип основан на использовании описанных методов структурной и вспомогательной частотной селекции (не нужно здесь подробности)
-
-
демодуляция сигнала (стр. 63, изложено не по тексту, а по логике схемы)
-
демодуляция неразрывно связана с селекцией, поиском , захватом и отслеживанием сигналов спутников
-
кодовая, навигационное сообщение и гармоническая часть в поступившем сигнале наложены и совмещены.
-
Далее выполняется демодуляция
-
временная подстройка опорного кодового сигнала
-
вычитание опорного кодового сигнала из поступившего дает разделение ПСП и навигационного сообщения
-
селекция и захват спутника
-
-
система управления приемника
-
захват, селекция и все прочее…все уже описано
-
-
обработка данных в приемнике
-
на основе кодовых сигналов определяется псевдодальность
-
псевдодальности до 4-х спутников дают пространственную засечку и грубое местоположение
-
первичная информация фазовых измерений динамически меняется из-за движения спутников. Регистрируется через 0,1сек и записывается в память через каждые 1-60 сек по желанию оператора с уплотнением.
-