

3.3 Контрольные задачи по поступательному, вращательному движениям твердого тела. (Задача к2)
Используя
закон движения одного из тел механизма,
определить для заданного момента времени
![]() с
скорость и ускорение точки М, скорость
и ускорение тела 3, угловые скорости и
угловые ускорения тел 1 и 2.
с
скорость и ускорение точки М, скорость
и ускорение тела 3, угловые скорости и
угловые ускорения тел 1 и 2.
Схемы механизмов показаны на рисунках 3.7, а необходимые данные приведены в таблице 3.1
Пример выполнения задачи К2.
Д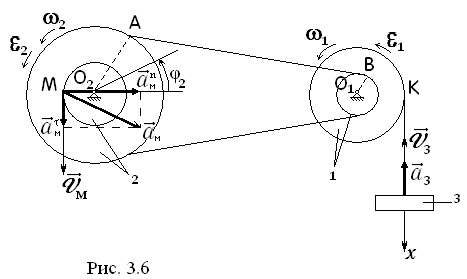 ля
механизма, схема которого показана на
рисунке 3.6, определить скорости и
ускорения точки М и тела 3, а также угловые
скорости и угловые ускорения тел1 и 2,
если дано:
ля
механизма, схема которого показана на
рисунке 3.6, определить скорости и
ускорения точки М и тела 3, а также угловые
скорости и угловые ускорения тел1 и 2,
если дано:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() .
.
Решение:
Согласно условию задачи вычерчиваем схему механизма (рис. 3.6).
Используя закон движения тела 2 найдем его угловую скорость и угловое ускорение.
![]() ,
,
![]() ,
,
![]() ,
,
![]()
Определим скорость и ускорение точки М
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Сравнивая
линейные скорости тел 2 и 1 в точках A
и B,
установим соотношение
![]() ,
,
откуда
![]() ,
,
![]() .
.
Теперь
![]() ,
,
![]() .
.
Сравнивая
линейные скорости в точке К, находим
![]() ,
,
![]() .
.
Ускорение
тела 3 будет равно
![]() ,
,
![]() .
.
Направление векторов показано на рис. 3.6
-







2,8
19,75
8,4
7,2
21
18
7
6
4. Сложное движение точки
Наблюдая движение окружающих нас тел, можно убедиться в том, что движение одного и того же тела будет казаться различным в зависимости от той системы, в которой ведется наблюдение за движением данного тела. При решении ряда задач приходится рассматривать движение точки или тела по отношению к нескольким системам отсчета, одна из которых считается условно неподвижной. Примерами указанного может быть движение человека в движущемся поезде, движение Луны вокруг Земли, Земли вокруг Солнца и т.п. Это значит, что наблюдаемые нами движения тел – относительные движения. Движение точки (тела) относительно нескольких систем отсчета называется сложным движением.
Условимся, при изучении сложного движения точки рассматривать две системы отсчета: систему, которую будем условно принимать за неподвижную (абсолютную) и систему подвижную.
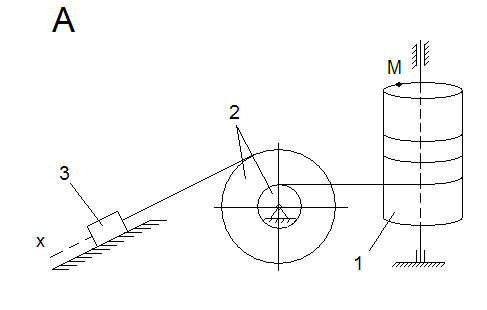
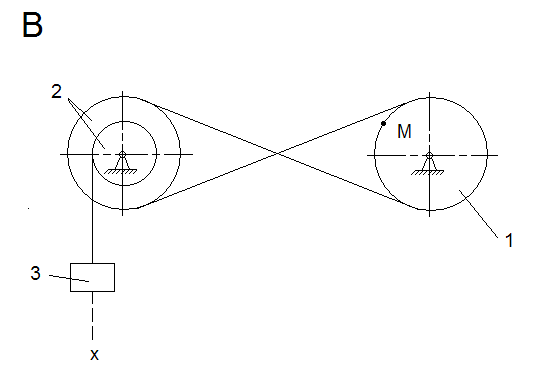
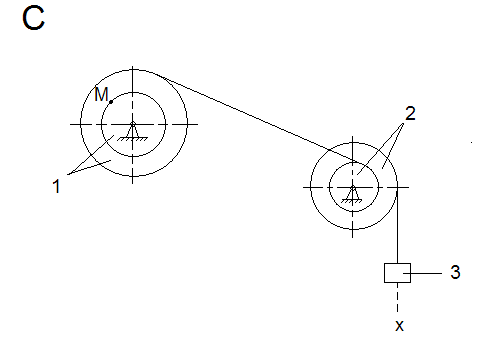
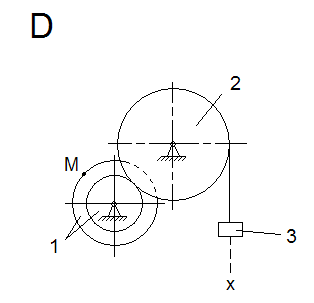
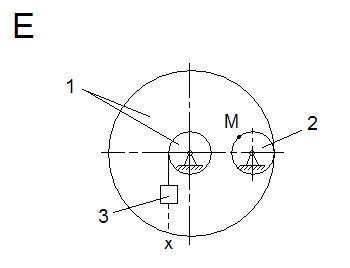
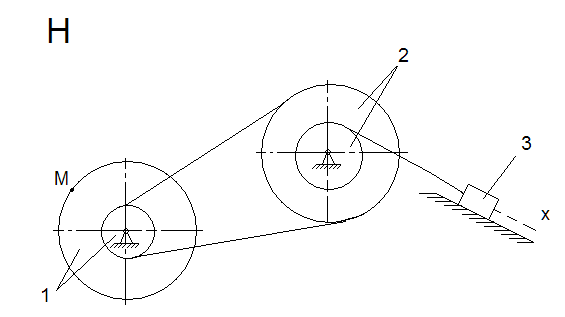
Рис. 3.7
Таблица 3.1
№ вар. |
Шифр схемы |
Уравнения движения тела |
Радиусы, м |
t1, c |
|||
R1 |
r1 |
R2 |
r2 |
||||
1 |
A |
3=0.1t4+0.8t |
0,6 |
- |
0,6 |
0,3 |
1 |
2 |
B |
φ2=1-t2 |
0,5 |
- |
0,5 |
0,3 |
0,5 |
3 |
C |
φ 1=0.5t2+3 |
0,8 |
0,4 |
0,6 |
0,4 |
1 |
4 |
D |
3=0.2t3+t |
0,9 |
0,8 |
1,0 |
- |
1 |
5 |
E |
φ 1=t(1-0.5t) |
2,0 |
0,7 |
0,7 |
- |
0,5 |
6 |
H |
φ 2=10t |
1,8 |
0,9 |
1,8 |
1,0 |
- |
7 |
A |
φ 1 =3+2.5t4 |
1,0 |
- |
0,8 |
0,4 |
1 |
8 |
B |
φ 2=5t2-2 |
0,3 |
- |
0,3 |
0,2 |
1 |
9 |
C |
3 =0.4t2+1 |
0,5 |
0,3 |
0,4 |
0,2 |
0,5 |
10 |
D |
φ 1=5t3+2 |
0,8 |
0,7 |
0,9 |
- |
1 |
11 |
E |
φ 2=3-6t2 |
1,8 |
0,6 |
0,6 |
- |
0,5 |
12 |
H |
3=1.2t3 |
1,6 |
0,8 |
1,6 |
0,9 |
0,5 |
13 |
A |
φ 1=1-t |
0,8 |
- |
0,6 |
0,4 |
- |
14 |
B |
3 =t4+1 |
0,7 |
- |
0,7 |
0,5 |
1 |
15 |
C |
φ 1=10t2-4 |
1,0 |
0,5 |
0,8 |
0,4 |
1 |
16 |
D |
φ2=2t(3-2t2) |
0,7 |
0,6 |
0,8 |
- |
0,5 |
17 |
E |
3=5t2-1 |
1,7 |
0,5 |
0,5 |
- |
0,5 |
18 |
H |
φ1=3t3+t |
1,4 |
0,7 |
1,4 |
0,8 |
1 |
19 |
A |
3=t(1+3t2) |
0,9 |
- |
0,5 |
0,3 |
1 |
20 |
B |
φ 2= -10t2 |
0,6 |
- |
0,6 |
0,4 |
1 |
21 |
C |
φ 1=1+20t |
1,2 |
0,6 |
1,0 |
0,5 |
- |
22 |
D |
3=7+1.6t2 |
0,5 |
0,4 |
0,6 |
- |
0,5 |
23 |
E |
φ1=2.5t4-8 |
1,5 |
0,4 |
0,4 |
- |
1 |
24 |
H |
φ 2=t3-2t |
1,2 |
0,6 |
1,2 |
0,7 |
1 |
25 |
A |
φ 1=2.5t+1 |
0,4 |
- |
1,0 |
0,5 |
- |
26 |
B |
φ 2=3t-4t3 |
0,9 |
- |
0,9 |
0,7 |
0,5 |
27 |
C |
3=6t+t4 |
0,7 |
0,4 |
0,5 |
0,3 |
1 |
28 |
D |
φ1=1-5t2 |
0,4 |
0,3 |
0,5 |
- |
1 |
29 |
E |
φ2=0.6t2-2t |
1,4 |
0,4 |
0,4 |
- |
1 |
30 |
H |
3=8t3+5 |
1,0 |
0,5 |
1,0 |
0,6 |
0,5 |
Примечание к табл. 3.1 : 3 – текущая абсцисса груза 3 в м; φ1, φ2 – углы поворота тел 1 и 2 в рад (положительное направление отсчета φ1 и φ2 против хода часовой стрелки).
Движение
точки по отношению к неподвижной системе
координат называется абсолютным
движением.
Скорость и ускорение точки в неподвижной
системе координат называется абсолютной
скоростью
![]() и абсолютным ускорением
и абсолютным ускорением
![]() .
.
Движение
точки относительно подвижной системы
координат называется относительным
движением,
а ее скорость и ускорение называются
![]() и
и
![]() В дальнейшем будем называть, соответственно
В дальнейшем будем называть, соответственно
![]() и
и
![]() .
.
Движение
подвижной системы отсчета относительно
неподвижной называется переносным
движением.
Скорость переносного движения
![]() в дальнейшем будем обозначать
в дальнейшем будем обозначать
![]() ,
а ускорение
,
а ускорение
![]() через
через
![]() .
.