

10.4 Тахогенераторы постоянного тока
В тахогенераторах используется классический принцип электромагнитной индукции, а конструкция их приспособлена для неограниченного вращения. Все тахогенераторы представляют собой электрические машины, содержащие статор и ротор. Видов тахогенераторов разработано много, поэтому рационально ввести их классификацию:
- тахогенераторы постоянного тока;
- тахогенераторы переменного тока:
- синхронные тахогенераторы;
- асинхронные тахогенераторы;
- индукторные тахогенераторы.
Тахогенератор постоянного тока представляет собой традиционную коллекторную электрическую машину, при конструировании которой основное внимание уделяется не энергетической эффективности (КПД и масса машины), а линейности и точности статической характеристики. Тахогенератор постоянного тока содержит статор с источником возбуждения постоянного магнитного поля (обмотка возбуждения или постоянный магнит), ротора с обмотками и щеточно–коллекторный узел (рис.105).

Рис.105
Тахогенератор постоянного тока.
При вращении ротора тахогенератора в каждой секции роторной обмотки наводится синусоидальная ЭДС (рис.106), частота которой равна произведению скорости вращения на число пар полюсов статора, а амплитуда – в соответствии с формулой (44).
Рис.106
Формирование выходного сигнала тахогенератора постоянного тока.
За счет переключений, осуществляемых щеточно-коллекторным устройством, на выход подается огибающая всех напряжений, вырабатываемых секциями роторной обмотки. Полезная составляющая выходного напряжения
![]() , (58)
, (58)
где ω – скорость вращения ротора (рад/сек). К полезной составляющей добавляется пульсация ΔU, для устранения вредного влияния которой можно использовать фильтр нижних частот.
Достоинством тахогенератора постоянного тока является удобная форма выходного сигнала (сигнал постоянного тока), достаточно высокая точность преобразования.
Главный недостаток этого типа тахогенераторов обусловлен наличием щеточно-коллекторного узла со скользящими электрическими контактами. Скользящие контакты имеют ограниченный ресурс работы, чувствительны к ударам и вибрациям и могут порождать дополнительные шумы выходного сигнала.
Свободны от отмеченных недостатков тахогенераторы переменного тока.
10.5 Синхронные тахогенераторы.
Синхронный тахогенератор является электрической машиной с постоянным магнитом на роторе и обмоткой на статоре (рис.107).
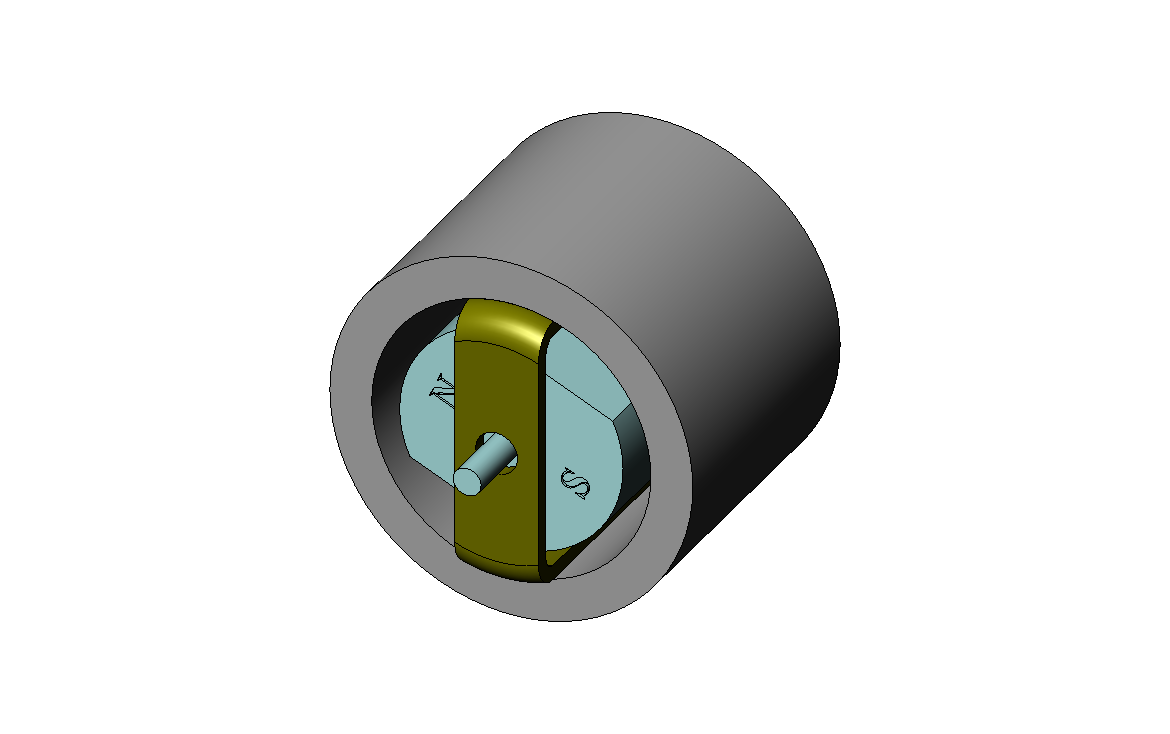
Рис.107
Синхронный тахогенератор.
При вращении ротора обмотка пересекается вращающимся магнитным полем постоянной величины и в ней наводится ЭДС
,
где
w
– число витков обмотки. Изменение потока
через обмотку будет периодическим с
частотой ω
и при соответствующей конструкции
ротора и статора можно обеспечить чтобы
это изменение было близко к синусоидальному
![]() (Ф0
– максимальная величина магнитного
потока через обмотку). В этом случае
(Ф0
– максимальная величина магнитного
потока через обмотку). В этом случае
![]() (59)
(59)
В обмотке наводится ЭДС, амплитуда и частота которой зависят от частоты вращения ротора (рис.108).
Рис.108
Выходной сигнал синхронного тахогенератора.
Поскольку информация о частоте вращения представлена в сигнале двумя способами, возможно два способа получения сигнала: амплитудный и частотный.
Амплитудный способ состоит в использовании амплитудного детектора и фильтра нижних частот (рис.109а).
Рис.109
Амплитудный способ обработки сигнала синхронного тахогенератора.
Амплитудный детектор (диод D) пропускает только положительные полуволны напряжения тахогенератора. После фильтрации (конденсатор С) получается сигнал постоянного тока пропорциональный скорости вращения ротора (рис. 109в). Статическая характеристика синхронного тахогенератора будет однотактной (нереверсивной), т.к. выходной сигнал не зависит от направления вращения (рис.109б). Для улучшения формы сигнала при детектировании вместо одиночного диода можно использовать выпрямительный мост, что обеспечит двухполупериодное выпрямление, исключит первую гармонику в детектированном сигнале и облегчит фильтрацию сигнала.
Точность представления информации с помощью сигнала постоянного тока полученного амплитудным способом ограничена зависимостью величины магнитного потока ротора и сопротивления проводников обмотки от температуры и старения.
Частотный способ получения информации ориентируется не на амплитудную составляющую сигнала, а на его частоту. Для этого исходное напряжение с обмотки тахогенератора с помощью компаратора К1 преобразуется в частотно-импульсный сигнал (рис.110).
Преобразование частотно-импульсного сигнала в цифровой сигнал – типовое преобразование, для реализации которого необходим генератор импульса эталонной длительности ТЭТ, ключ К и счетчик импульсов СЧ.
Рис.110
Формирование цифрового сигнала при частотном способе обработки сигнала синхронного тахогенератора.
Ключ К открывается импульсом генератора длительностью ТЭТ и пропускает на счетчик импульсы, сформированные компаратором К1. Количество импульсов прошедших за время ТЭТ на счетчик составит
![]() , (60)
, (60)
где fИМП – частота импульсов на выходе компаратора, которая равна fВРр.
Здесь fВР – частота вращения вала (Гц), р – число пар полюсов синхронного тахогенератора.
Длительность эталонного импульса следует выбирать из расчета, чтобы при максимальной скорости вращения количество импульсов, прошедших за время ТЭТ на счетчик составит величину обратную требуемой точности измерения.
Частота fИМП не зависит от изменения свойств магнита, температуры и других обстоятельств, поэтому измерение частоты вращения с помощью синхронного тахогенератора в частотном режиме является одним из самых точных способов измерения частоты вращения. К недостаткам частотного метода можно отнести ограниченное быстродействие, поскольку очередной новый результат можно получить только с запаздыванием на величину ТЭТ.
Например – если максимальная скорость вращения fВР = 50 Гц (3000 об/мин), число пар полюсов р = 6 и требуемая точность измерения 1/N = 0.001 (0.1%), то
![]() сек.
сек.
Для повышения быстродействия при сохранении точности измерения рационально увеличивать число пар полюсов синхронного тахогенератора. Приемы увеличения числа пар полюсов были рассмотрены в применении к датчикам перемещения (СКВТ, индуктосин, оптоэлектронный датчик накапливающего типа).
Существует другой способ анализа информации о скорости вращения при наличии частотно - модулированного сигнала от синхронного тахогенератора. Для повышения быстродействия анализируется не количество импульсов за заданное время, а период одного (или заданного количества) импульсов. Для рассмотренного выше примера частота импульсов составляет fИМП =fВР р=50 х 6=300 Гц. Соответственно период чередования импульсов
![]()
Измерение длительности импульса и преобразование ее в цифровой код (в число) было рассмотрено при описании фазового режима работы СКВТ.
Для получения точности 0,1% частота тактового генератора должна быть в 1000 раз выше, чем частота измеряемого сигнала. В рассматриваемом примере
fТГ=1000х fИМП= 300 кгц.
Результат измерения будет получен с запаздыванием всего ≈3,5 мсек.
Если необходима информация непосредственно о частоте вращения, с помощью микропроцессора ее можно найти как величину обратную измеренному периоду. Если задача системы управления – стабилизировать скорость вращения некоторого механизма, то это вычисление можно не производить, а при построении системы решать задачу стабилизации периода сигнала от синхронного тахогенератора. Тем самым будет стабилизирована и частота вращения, а запаздывание получения информации будет уменьшено в 1000 раз, что способствует улучшению динамических свойств проектируемой системы.