

1 Дослідження основних характеристик
ПРОМИСЛОВОГО РОБОТА РМ-01
Мета роботи
Метою роботи є вивчення основних технічних характеристик робота РМ-01, основних органів керування, набуття практичних навичок управління роботом за допомогою пульта ручного керування.
Методичні вказівки з організації самостійної роботи студентів
Перед виконанням лабораторної роботи студент повинен:
вивчити лекційний матеріал за темою лабораторної роботи;
зрозуміти порядок роботи на лабораторній установці;
звернути особливу увагу на застережні заходи під час виконання роботи;
підготувати протокол для записування результатів;
отримати у викладача допуск до виконання роботи і завдання;
під час підготовки ознайомитися з теоретичним матеріалом.
1.3 Опис лабораторної установки
Промисловий робот (ПР) РМ-01 використовується для виконання різноманітних операцій складання, монтажу, сортування, пакування, завантаження-розвантаження, дугового зварювання і т.д. Маніпулятор робота має шість ступенів рухомості. Ланки маніпулятора з'єднуються одна з одною за допомогою суглобів, що імітують ліктьовий або плечовий суглоб людини. Кожна ланка маніпулятора приводиться до дії індивідуальним електродвигуном постійного струму через редуктор. Електродвигуни обладнані електромагнітними гальмами, що дозволяють надійно загальмувати планки маніпулятора. Цим забезпечується безпека обслуговування робота та можливість переміщення його ланок у ручному режимі.
Таблиця 1.1 – Параметри ступенів рухомості
Номер суглоба |
Діапазон руху, град. |
Макс. швидкість, град/с |
Макс. момент, Нм |
1 |
320 |
1,4 |
67 |
2 |
266 |
0,9 |
1,3 |
3 |
284 |
2,1 |
57 |
4 |
280 |
4,0 |
14 |
5 |
200 |
4,2 |
12 |
6 |
532 |
4,0 |
14 |
ПР РМ-01 має такі основні технічні характеристики:
Кількість ступенів рухомості Найбільша вантажопідйомність, н Статичне зусилля у робочій точці оснащення, н Абсолютна похибка позиціонування, мм Швидкість руху з максимальним вантажем, м/с по вільній траєкторії по прямолінійній траєкторії Робочий простір без оснащення
Привід захоплювального пристрою |
6 2,5 не більше 60 +0.1
не більше 1,0 не більше 0,5 сферичний з радіусом 0,92 пневматичний |
Суглоби маніпулятора і системи координат робота наведено на рис. 1.1.
Базова система координат (WORLD) має три взаємно перпендикулярні осі X, Y, Z з початком координат, розташованим на осі симетрії плеча маніпулятора. Під час руху суглобів маніпулятора базова система маніпуляторів є непорушною. Інструментальна система координат (ТООL) прикріплена до монтажного фланця кисті і переміщується разом з ним. ПР РМ-01 має позиційно-контурну систему керування, що реалізована мікропроцесорною системою керування «СФЕРА-36», побудованою за ієрархічним принципом.
Р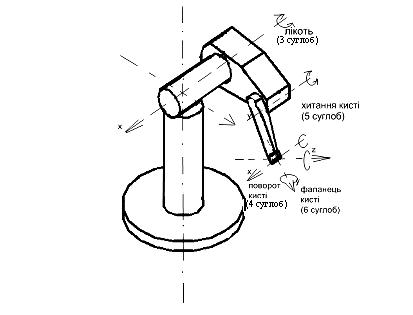 исунок
1.1 – Система координат РМ-01
исунок
1.1 – Система координат РМ-01
«СФЕРА-36» містить два рівні керування: верхній і нижній. На верхньому вирішуються такі задачі:
розрахунок алгоритмів планування траєкторії руху захвату маніпулятора і підготовка програм руху кожної його ланки;
логічна обробка інформації про стан пристроїв, що складають робототехнічний комплекс (РТК), і погодження роботи у складі РТК;
обмін інформацією з ЕОМ вищого рівня;
діалоговий режим роботи оператора за допомогою відеотерміналу та клавіатури;
зчитування-запис, довготривале зберігання програм за допомогою НГМД;
ручний режим управління маніпулятором за допомогою пульта ручного керування;
діагностика роботи системи керування;
калібрування положення ланок маніпулятора.
На нижньому рівні керування вирішуються задачі обробки ланками маніпулятора заданих рухів, що формуються на верхньому рівні. Відпрацювання програмованих положень здійснюється при заданих параметрах (швидкості, прискоренні) за допомогою цифрових електромеханічних модулів, які приводять у рух ланки маніпулятора. Система керування (рис. 1.2) складається з модуля центрального процесора (МЦП); оперативно запам’ятовуючого пристрою (ОЗП); постійно запам’ятовуючого пристрою ((ПЗП); модуля аналогового введення (МАВ), куди подаються сигнали від потенціометричних датчиків приблизного обчислювання положення; модуля послідовного інтерфейсу (МПІ), модуля введення-виведення (МВВ); модуля зв'язку (МЗ). Обмін інформацією між модулями верхнього рівня здійснюється за допомогою системної магістралі МІ.
Нижній рівень керування містить:
модулі процесора приводу (МПП);
модулі керування приводом (МКП).
Кількість модулів МПП і МКП відповідає кількості ланок маніпулятора і дорівнює 6. МПП з'єднуються з модулем зв'язку за допомогою системних магістралей М2 і МЗ. Керування електродвигунами ланок маніпулятора здійснюється за допомогою транзисторних широтно-імпульсних перетво-рювачів (ШІП), що входять до складу блоку живлення (БЖ). МЦП виконаний на базі мікропроцесора К1801 і містить:
однокришталевий процесор;
регістр початкового запуску;
системний ОЗП ємністю 3216-розрядних слів; системний ПЗП ємністю 2×16-розрядних слів;
резидентне ПЗП ємністю 4×16-розрядних слів;
програмований таймер.
МЦП організовує обмін інформацією за допомогою системної магістралі МІ, що функціонально зв'язана з одноканальним процесором К1801АМ1.
Швидкодія МЦП характеризується такими даними:
додавання при регістровому засобі адресації – 2,0 мкс;
додавання при посередньо-регістровому засобі адресації – 5,0 мкс.
Зовнішній вигляд панелі оператора зображено на рисунку 1.3. Панель оператора призначено для виконання операцій увімкнення та вимкнення ПР, для вибору режимів його роботи.

Рисунок 1.2 – Функціональна схема СК
Основними елементами панелі є:
перемикач мережного живлення (МЕРЕЖА);
кнопка аварійного вимкнення (АВАРІЯ). Мережне живлення вимикається під час натискання кнопки. Повернення кнопки у початкове положення здійснюється поворотом її за годинниковою стрілкою;
кнопка ввімкнення живлення системи керування (СК1);
кнопка вимкнення живлення системи керування (СКО);
кнопка ввімкнення живлення приводу (ПРИВІД 1). Натисканням кнопки вмикається живлення приводу, одночасно з цим розблоковуються електромагнітні гальма двигунів;
кнопка вимкнення живлення приводів (ПРИВІД 0);
перемикач вибору режиму має три положення: РОБОТА, ЗУПИНКА, РЕСТАРТ. У режимі РОБОТА система працює нормально. У режимі ЗУПИНКА виконання програми зупиниться в кінці кроку, що виконується. Переведення перемикача у режим РОБОТА призведе до продовження виконання програми з початку наступного кроку. Режим РЕСТАРТ використовується для повторного запуску виконання програми користувача з першого її кроку;
кнопка автоматичного запуску (АВТОСТАРТ). Натисканням кнопки система запускається так, що робот починає виконувати програму без задання команд з клавіатури. Натискання кнопки виконується після ввімкнення живлення СК. Активізація режиму відбувається після ввімкнення ПРИВІД 1.

Рисунок 1.3 – Пульт оператора
Пульт ручного керування, зовнішній вигляд якого зображено на рисунку 1.4, використовується для позиціонування маніпулятора під час навчання та програмування. Пульт забезпечує 5 режимів роботи:
керування маніпулятором від ЕОМ (СОМР);
ручне керування в основній системі координат (WORLD);
ручне керування за ступенями рухомості (JOINТ);
ручне керування у системі координат інструменту (ТООL);
вимкнення приводів вимірювання рухомості (FRЕЕ). Вибраний режим ідентифікується сигнальною лампочкою.

Рисунок 1.4 – Пульт ручного керування
Швидкість руху маніпулятора регулюється за допомогою кнопок «SPEED», «+», «–».
Для того, щоб стиснути та розтиснути захоплювальний пристрій маніпулятора, використовують кнопки «СLOSЕ» і «ОРЕN». Кнопка «SТЕР» слугує для запису координат точок під час задання траєкторії переміщення. Кнопка «ОСТАНОВ», розташована на торці пульта ручного керування, призначена для переривання виконання програми з відключенням живлення приводів. Використовується для зупинки руху у нормальній ситуації.
Кнопка «OFF» має аналогічне призначення. Різниця полягає лише у тому, що живлення приводів маніпулятора не вимикається.
Переміщення суглобів маніпулятора за допомогою пульта ручного керування здійснюється у трьох режимах: JOINT, WORLD і TOOL.
У режимі JOINT (обирається відповідною кнопкою на пульті керування) користувач може керувати безпосередньо переміщенням окремих ланок маніпулятора. Цим переміщенням відповідають пари кнопок «–» та «+» відповідно до кожної ланки маніпулятора (тобто колона, плече, лікоть та три рухи захоплювання).
У режимі WORLD здійснюється фактично фіксація відносно основної системи координат і переміщення в окремих напрямках цієї системи (відповідно X, Y, Z).
Слід зазначити, що робота у режимі WORLD має здійснюватися на малих швидкостях, щоб виключити попадання у межі простору руки робота. Також зауважимо, що переміщення забезпечується одночасно та автоматично за допомогою всіх ланок маніпулятора.
Режим TOOL забезпечує переміщення в активній системі координат. 12-розрядний рядковий індикатор призначено для виведення інформації про режими роботи та помилки:
NOKIA АОХ – висвічується протягом нетривалого часу під час запуску;
ARM PWR OFF – живлення приводів маніпулятора вимкнено;
MANUAL MODE – дозволено управління роботом з пульта керування;
СОМР MODE – маніпулятор керується від ЕОМ;
LIMIT STOP – суглоб переміщено до крайнього положення;
TOO CLOSE – задана точка знаходиться надто близько до маніпулятора;
TOO FAR – задана точка знаходиться поза робочою зоною робота;
TEACH MODE – активізовано режим TEACH, маніпулятор переміщується за довільними траєкторіями;
STEACH MODE – активізовано режим TEACH-S, маніпулятор переміщується за прямолінійними траєкторіями;
ERROR – на пульті ручного керування водночас натиснуто кнопки, що утворюють неприпустиму операцію та ін.
Крім того, індикатор вибраної швидкості при такому кодуванні:
1-й засвічений елемент – швидкість інструменту ≈ 1.9 мм/с;
2-й засвічений елемент – швидкість інструменту ≈ 3.8 мм/с;
3-й засвічений елемент – швидкість інструменту ≈ 7.5 мм/с;
4-й засвічений елемент – швидкість інструменту ≈ 15 мм/с;
5-й засвічений елемент – швидкість інструменту ≈ 30 мм/с;
6-й засвічений елемент – швидкість інструменту ≈ 60 мм/с;
7-й засвічений елемент – швидкість інструменту ≈ 120 мм/с;
8-й засвічений елемент – швидкість інструменту ≈ 240 мм/с.