

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ХАРКІВСЬКИЙ НАЦІОНАЛЬНИЙ
УНІВЕРСИТЕТ РАДІОЕЛЕКТРОНІКИ
МЕТОДИЧНІ ВКАЗІВКИ
до виконання лабораторних робіт з дисципліни
"СИСТЕМИ ДЛЯ МАЛИХ ТА МОБІЛЬНИХ ПЛАТФОРМ"
для студентів
усіх форм навчання зі спеціальності
"ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ АВТОМАТИЗОВАНИХ СИСТЕМ"
ЗАТВЕРДЖЕНО
кафедрою "Мережі зв’язку"
Протокол №4 від 10.10.05
Харків 2006
Методичні вказівки до виконання лабораторних робіт з дисципліни „Системи для малих та мобільних платформ” для студентів усіх форм навчання зі спеціальності 6.080403 „Програмне забезпечення автоматизованих систем” за напрямком 0804 „Комп’ютерні науки” / Упоряд.: І.М. Пресняков, С.А. Кривенко – Харків: ХНУРЕ, 2006. – 20 с.
Упорядники: І.М. Пресняков,
С.А. Кривенко
ЗМІСТ
Вступ 4
1 Інструментальні засоби розробки 5
2 Операційна система 12
3 Прикладне програмне забезпечення 14
Перелік посилань 18
Додаток А 19
ВСТУП
Навчальна дисципліна „Системи для малих та мобільних платформ” читається на четвертому курсі (у восьмому семестрі) студентам, що готуються за напрямком 0804 „Комп’ютерні науки”.
Предметом дисципліни є побудова та функціонування систем для малих та мобільних платформ.
Мета дисципліни полягає в підготовці студентів у галузі проектування, виробництва та експлуатації систем для малих та мобільних платформ на рівні, достатньому для практичної діяльності за спеціальністю.
Відповідно до мети викладення дисципліни головними завданнями викладення дисципліни є: засвоєння студентами основ побудови, функціонування, програмування та експлуатації систем для малих та мобільних платформ на рівні умінь, достатніх для практичної діяльності; вивчення студентами основ застосування, побудови та функціонування систем для малих та мобільних платформ на рівні, необхідному для вивчення системи взаємопов’язаних дисциплін; ознайомлення студентів з системами для малих та мобільних платформ на рівні, достатньому для формування уявлень, які б розширювали професійний кругозір.
Лабораторний практикум присвячений експериментальному підтверд-женню теоретичних положень, кількісній і якісній оцінці фізичних процесів та їхньому аналізу в мікропроцесорних засобах мобільних платформ, набуттю навичок самостійної роботи з сучасним обладнанням.
В циклі лабораторних робіт виконується розробка і дослідження програмного забезпечення мобільної платформи на базі ядра RISC-мікропроцесору структури ARM та операційної системи Symbian EPOC. Ядро ARM зараз застосовують у платформі Pocket PC та PSION. Такі платформи застосовують у своїх розробках провідні лідери у галузі телекомунікацій, такі як NOKIA, INTEL, MOTOROLA, TOSHIBA, Matsushita, Ericsson, Hewlett-Packard, MITEL та ін. Всього за дисципліною „Системи для малих та мобільних платформ” передбачено 3 лабораторних роботи. Кожна робота є продовженням попередньої.
1 Інструментальні засоби розробки
1.1 Мета роботи
Якісна оцінка можливостей застосування інструментальних засобів розробки проекту програмного забезпечення мікропроцесора ARM60, та відпрацювання проекту, що генерує послідовність випадкових чисел у мобільній платформі. Оцінювання швидкодії емулятора мікропроцесора.
Набуття практичних навичок роботи із сучасним лабораторним устаткуванням i методикою відпрацювання систем для малих та мобільних платформ.
1.2 Методичні вказівки з організації самостійної роботи студентів
За допомогою конспекту лекцій та літератури [1–3] проробити тему "Інтерфейси систем для малих та мобільних платформ". Виконати контрольні завдання та відповісти на контрольні запитання. Для більш досконалого самостійного оволодіння матеріалом звернутися за допомогою INTERNET на сторінку фірми MITEL на адресу http://www.mitel.com.
1.3 Опис лабораторної установки
Для виконання лабораторних робіт необхідна ПЕОМ такої конфігурації: ІBM PC сумісний процесор типу Pentіum90MHz або, краще, операційна система Wіndows95/98/NT/2000/XP, оперативний запам'ятовуючий пристрій не менше 16Mb (рекомендується не менше 32Mb), твердий диск, на якому має бути не менше 15Mb вільного простору, Microsoft-маніпулятор, миша чи аналогічний пристрій, карта відео і графічний дисплей VGA з розгорткою не менше 800x600 або, краще, комплект інструменту – ARM Software Development Toolkit. Вікно середовища GPS ARM Toolkit Shell наведено на pиc.1.1.
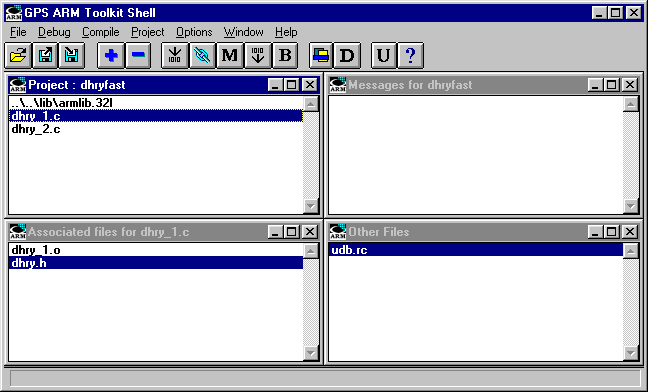
Рисунок 1.1 – Вікно середовища GPS ARM Toolkit Shell
Панель інструментів наведена на рис.1.2.

Рисунок 1.2 – Панель інструментів
Будь-який файл можна редагувати одним із трьох методів: вибрати y вікні файлів проекту i натиснути кнопку „Редагувати файл”; вибрати файл за допомогою команди File/Open, двічі натиснувши ліву кнопку миші на файлі y вікні файлів проекту, асоційованих файлів і інших файлів.
Докладну інформацію про пакет можна отримати, звернувшись до фірми MITEL за адресою http://www.mitel.com.
Докладну інформацію про засоби телекомунікацій можна отримати, звернувшись до Європейського інституту стандартів зв'язку за адресою http://www.etsі.org.
Запуск системи виконується за допомогою меню „Пуск”. У підменю „Програми” потрібно відкрити відповідну програмну групу GPS ARM Toolkit. Потім у цій програмній групі необхідно вибрати ім’я проекту з виконуваної лабораторної роботи.
Після закінчення кожної лабораторної роботи папку з файлами проекту необхідно скопіювати на дискету, щоб уникнути втрати даних.
Порядок виконання роботи такий: ознайомитися з метою роботи і описом лабораторної установки; виконати методичні вказівки з організації самостійної роботи студентів; вивчити порядок виконання роботи; виконати роботу з використанням системи автоматизованого проектування; оформити звіт з лабораторної роботи та захистити його.
1.3.1 У даній лaбopтopній poбoтi пpoгpaмa, написана на C - мові високого рівня, запускає програму апаратного рівня, реалізовану на мові Асемблера, яка y свою чергу передає керування С програмі після закінчення обчислень. Досліджуються можливості вбудованого засобу UDB для відпрацьовування реальних систем, a також взаємодія двох інструментів: середовища розробки проектів для мікропроцесорів ARM Toolkit Shell i вбудованого засобу UDB. Повний курс програмування мікропроцесорів серії ARM викладений y відповідній документації фірми Advanced RISC Machines Ltd.
1.3.2 Підготовчі операції
Викликати проект подвійним клацанням на піктограмі RANDOM.
Файли randtest.c (C файл), random.s (файл, написаний мовою Асемблера) та armlib.321 (бібліотечний файл) наведені y вікні Project Files.
Натиснути кнопку MAKE, y вікні Message має з’явитися така інформація:
Making…
ARM AOF Macro Assembler 2.23 (A.R.M.) [May 03.1994]
Symbol table conversion: APM -> UDB, Version 2.3a
Copyright (C) 1986-1995 Case Tools, Inc. All rights reserved,
Armasm -VIA asmvia.tmp – g -o random.o random.s
Armcc -VIA ccvia.tmp -g randtest.c
Armlink -VIA linkvia.tmp
Mksym rand rand.sym
Make done
Тепер проект готовий для налагодження.
Натиснути кнопку UDB, щоб викликати відповідний засіб, на екрані монітора мають з’явитися вікна, наведені на рис.1.3.

Рисунок 1.3 – Вигляд екрана монітора
Кількість, тип та розташування вікон задається y UDB.RC файлі.
Усі C програми містять вступну частину перед програмою користувача. Ця вступна частина маркується ключовим словом main і використовується, щоб задати стеки, конфігурацію системи тощо. Програма користувача запускає позначку main, тому у файлі UDB.RC розташовані команди, для того щоб задати контрольну точку в main та потім запустити її, вилучаючи контрольну точку перед показом програми на екрані монітора. Це гарантує, що користувач може виконувати налагодження власної програми якомога швидше, не виконуючи щоразу стандартну процедуру настройки. При цьому кнопка Start дозволяє повертати відпрацювання назад до початку програми користувача в будь-який час.