

5.6. Інтерфейси rs-232 і rs-422
Інтерфейс RS-422 використовується набагато рідше, ніж RS-485 і, як правило, не для створення мережі, а для з'єднання двох пристроїв на великій відстані (до 1200 м), оскільки інтерфейс RS-232 працездатний тільки на відстані до 15 м. Кожен передавач RS-422 може бути навантажений на 10 приймачів. Інтерфейс працездатний при напрузі до ±7 У.
На рис. 5.7 показаний приклад з'єднання двох інтерфейсів RS-422 перетворювачів типу NL-232C фірми НІЛ АП з метою збільшення дальності зв'язку двох пристроїв.
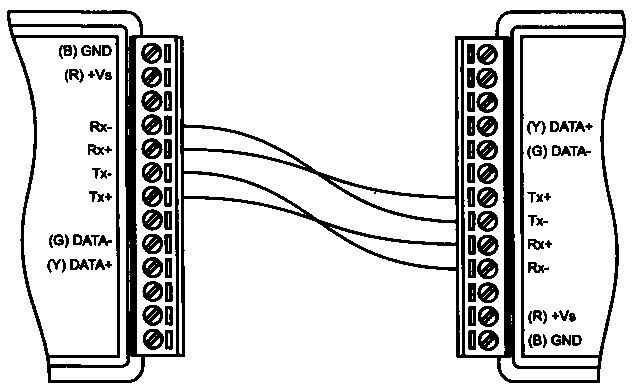
Рис. 5.7. З'єднання двох модулів перетворювачів інтерфейсу RS-232/RS-422
У табл. 5.3 приведено порівняння основних характеристик трьох найбільш популярних інтерфейсів, використовуваних в промисловій автоматизації.
Таблиця 5.3 Порівняння інтерфейсів RS 232, RS-422 і RS-485
Параметр |
RS-232 |
RS-422 |
RS-485 |
Спосіб передачі сигналу |
Однофазний |
Диференціальний |
|
Максимальна кількість приймачів |
1 |
10 |
32 |
Максимальна довжина кабелю, м |
15 |
1200 |
1200 |
Максимальна швидкість передачі, Мбіт/с |
0,460 |
10 |
30* |
Синфазна напруга на виході, В |
±25 |
-0,25...+6 |
-7...+12 |
Напруга в лінії під навантаженням, В |
±5... ±15 |
±2 |
±1,5 |
Імпеданс навантаження, Ом |
3000...7000 |
100 |
54 |
Струм витоку в «третьому» стані, мкА |
- |
- |
±100 |
Допустимий діапазон сигналів на вході приймача, В |
±15 |
±10 |
-7...+12 |
Чутливість приймача, В |
±3 |
±0,2 |
±0,2 |
Вхідний опір приймача, кОм |
3...7 |
4 |
|
* Швидкість передачі 30 Мбіт/с забезпечується сучасною елементною базою, але не є стандартною. |
|||
Лекція 6. Комплекс стандартів CAN
6.1. Основні властивості CAN.
6.2. Фізичний рівень Саn.
6.3. Типова структура трансівера Саn.
6.4. Канальний рівень Саn.
Саn (Controller Area Network — область, охоплена мережею контролерів) є комплексом стандартів для побудови розподілених промислових мереж, який використовує послідовну передачу даних в реальному часі з дуже високим ступенем надійності і захищеності. Центральне місце в Саn займає протокол канального рівня моделі OSI. CAN охоплює два рівні моделі OSI — фізичний і канальний (табл. 6.1).
Таблиця 6.1 CAN відповідно до моделі OSI
№ |
Назва рівня |
Підрівні CAN |
Примітка |
7 |
Прикладний |
|
Стандартом CAN не встановлений. Визначений стандартами CAL, CANopen, DeviceNet, SDS, CAN Kingdom і ін. |
6 |
Уявлення |
Немає |
Немає |
5 |
Сеансовий |
Немає |
Немає |
4 |
Транспортний |
Немає |
Немає |
3 |
Мережевий |
Немає |
Немає |
2 |
Канальний (передачі даних) |
LLC MAC |
Підтвердження фільтрації, повідомлення про перевантаження, управління відновленням даних. Формування пакетів даних, кодування, управління доступом, виявлення помилок, сигналізація про помилки, підтвердження прийому, перетворення з послідовної форми в паралельну і назад |
1 |
Фізичний |
Фізичний |
Забезпечення надійної передачі на рівні байтів (кодування, контрольна сума, тимчасові діаграми, синхронізація). Вимоги до лінії передачі |
Примітка: MAC (Medium Access Control) — управління доступом до каналу; LLC (Logical Link Control) — управління логічними зв'язками. |
|||
Стандарт не передбачає ніякого протоколу прикладного (7-го) рівня моделі OSI. Тому для його втілення в життя різні фірми розробили декілька таких протоколів: CANopen (організації CIA), SDS (фірми Honeywell Micro Switch Division), CAN Kingdom (фірми Kvaser), DeviceNet (фірми Allen-Bradley, що став Європейським стандартом в 2002 р.) і ряд інших.