

КОНСПЕКТ ЛЕКЦІЙ З КІСУ
ЗМІСТ
Лекція 1. Архітектура автоматизованИХ систем 7
1.1. Різновиди архітектури. 7
1.2. Вимоги до архітектури. 9
1.3. Розподілені системи автоматизації. 13
1.4. Багаторівнева архітектура 17
Лекція 2. Застосування Інтернет-технологій 22
2.1. Проблеми і їх вирішення 23
2.2. Основні поняття технології Інтернет 24
2.3. Принципи управління через Інтернет 26
Лекція 3. Відкриті системи 31
3.1. Поняття відкритої системи 31
3.2. Властивості відкритих систем 33
3.3. Засоби досягнення відкритості 37
3.4. Переваги і недоліки 39
Лекція 4. Промислові мережі і інтерфейси 43
4.1. Відмінність промислових мереж від офісних. 43
4.2. Основні поняття промислових мереж. 44
4.3. Модель OSI 49
Лекція 5. Інтерфейси RS-485, RS-422 і RS-232 55
5.1. Принципи побудови 55
5.2. Узгодження лінії з передавачем і приймачем 59
5.3. Топологія мережі на основі інтерфейсу RS-485 64
5.4. Усунення стану невизначеності лінії 65
5.5. Крізні струми. 66
5.6. Інтерфейси RS-232 і RS-422 68
Лекція 6. Комплекс стандартів CAN 70
6.1. Основні властивості CAN. 71
6.2. Фізичний рівень Саn. 71
6.3. Типова структура трансівера Саn. 74
6.4. Канальний рівень Саn. 78
7.1. Загальні відомості про Profibus. 81
7.2. Фізичний рівень 82
7.3. Канальний рівень Profibus DP 84
7.4. Резервування 90
7.5. Опис пристроїв 91
ЛЕКЦІЯ 8. Промислова мережа Modbus. 94
8.1. Загальні відомості про протокол Modbus. 94
8.2. Фізичний рівень 96
8.3. Канальний рівень 98
8.4. Прикладний рівень. 101
ЛЕКЦІЯ 9. Промисловий Ethernet. 103
9.1. Особливості Ethernet. 103
9.2. Фізичний рівень 106
9.3. Канальний рівень 115
Лекція 10. БЕЗДРОТОВІ ЛОКАЛЬНІ МЕРЕЖІ|сіті| 119
10.1. Проблеми бездротових мереж|сітей| 121
10.2 Залежність щільності потужності від відстані. 122
10.3 Вплив інтерференції хвиль. 124
10.4 Джерела перешкод. 124
10.5 Деякі особливості бездротових каналів. 126
ЛЕКЦІЯ 11| МЕТОДИ УСУНЕННЯ| ПЕРЕШКОД| ТА ПІДВИЩЕННЯ| НАДІЙНОСТІ| ЗВ’ЯЗКУ| 129
11.1 Широкосмугова передача. 129
11.2 Методи розширення спектру і модуляції несучої. 132
11.3 Методи зменшення кількості помилок в каналі. 135
11.4 Передача повідомлень|сполучень| без підтвердження про отримання|здобуття|. 137
ЛЕКЦІЯ 12. СТАНДАРТИ БЕЗДРОТОВИХ| МЕРЕЖ 139
12.1. Стандарт Bluetooth| 139
12.2. Стандарт ZigBee| 141
12.3. Модель передачі даних. 146
ЛЕКЦІЯ 13. МЕРЕЖА WI-FI| І IEEE| 802.11 151
13.1. Фізичний і канальний рівні. 152
13.2. Архітектура мережі|сіті| Wi-Fi|. 155
13.3. Порівняння бездротових мереж|сітей| 156
ЛЕКЦІЯ 14. МЕРЕЖЕВЕ|мережне| УСТАТКУВАННЯ|обладнання| 157
14.1. Повторювачі інтерфейсу 159
14.2. Перетворювачі інтерфейсу 161
14.3. Адресовані перетворювачі інтерфейсу 165
14.4. Інше мережеве|мережне| устаткування|обладнання| 166
14.5. Кабелі для промислових мереж|сітей| 169
ЛЕКЦІЯ 15 ЗАХИСТ ВІД ПЕРЕШКОД 173
15.1. Джерела перешкод 174
15.2. Характеристики перешкод 175
15.3. Перешкоди з|із| мережі|сіті| електропостачання 178
15.4. Електромагнітні перешкоди 181
ЛЕКЦІЯ 16. ЗАЗЕМЛЕННЯ 184
16.1. Визначення 185
16.2. Цілі заземлення 187
16.4. Види заземлень 192
ЛЕКЦІЯ 17. ВИМІРЮВАЛЬНІ КАНАЛИ. 196
17.1. Точність, що вирішує здатність і поріг чутливості 196
17.2. Похибка методу вимірювань. 199
17.3. Похибка програмного забезпечення 200
17.4. Достовірність вимірювань. 201
ЛЕКЦІЯ 18. Програмовані логічні контролери (ПЛК) ДЛЯ СИСТЕМ АВТОМАТИЗАЦІЇ. ПЛК. 205
18.1. Типи ПЛК. 205
18.2. Архітектура. 207
18.3. Характеристики ПЛК. 210
18.4. Пристрої збору даних. 213
ЛЕКЦІЯ 19. КОМП'ЮТЕР В СИСТЕМАХ АВТОМАТИЗАЦІЇ 218
| 19.1. Комп'ютер як контроллер 218
19.2. Комп'ютер для спілкування з|із| оператором 220
19.3. Промислові комп'ютери 221
ЛЕКЦІЯ 20. ПРИСТРОЇ ВВОДУ АНАЛОГОВИХ СИГНАЛІВ. 226
20.1. Введення аналогових сигналів 226
20.2. Структура модулів вводу. 227
20.3. Модулі вводу струму і напруги 230
ЛЕКЦІЯ 21. ПРИСТРОЇ ВВОДУ-ВИВОДУ. 233
21.1. Виведення аналогових сигналів. 233
21.2. Введення дискретних сигналів 237
21.3. Виведення дискретних сигналів 241
ЛЕКЦІЯ 22. МОДУЛІ ВВОДУ ІМПУЛЬСНИХ ПОСЛІДОВНОСТЕЙ І УПРАВЛІННЯ. 245
22.1. Типовий модуль вводу частотних сигналів. 245
22.2. Модулі управління рухом. 247
ЛЕКЦІЯ 23. ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ. 253
23.1. Розвиток програмних засобів автоматизації. 253
23.2. Графічне програмування 256
23.3. Графічний інтерфейс. 257
23.4. Відкритість програмного забезпечення. 258
23.5. Зв'язок з фізичними пристроями. 259
23.6. Бази даних. 260
23.7. Операційні системи реального часу. 261
ЛЕКЦІЯ 24. ОРС-СЕРВЕР. 265
24.1. Огляд стандарту ОРС. 265
24.2. ОРС DA-сервер 267
ЛЕКЦІЯ 25. МОДИФІКАЦІЇ ТА ЗАСТОСУВАННЯ ОРС UA –СЕРВЕРІВ 274
25.1. Специфікація OPC UA. 274
25.2. ОРС DA-сервер в середовищі MS Excel. 280
25.3 Застосування|вживання| ОРС-сервера| з|із| MATLAB| і Lab| VIEW 283
ЛЕКЦІЯ 26. 285
Системи програмування на мовах МЕК 61131-3. 285
26.1. Мова релейноконтактних схем LD. 288
26.2. Список інструкцій IL. 289
26.3. Структурований текст ST. 289
26.4. Діаграми функціональних блоків FBD. 290
26.5. Функціональні блоки стандартів МЕК 61499 і МЕК 61804. 291
26.6. Послідовні функціональні схеми SFC. 294
26.7. Програмне забезпечення. 295
Лекція 27. інтерфейс користувача, SCADA-пакетИ. 299
27.1. Функції SCADA. 299
27.2. Властивості SCADA. 304
27.3. Програмне забезпечення. 307
Лекція 1. Архітектура автоматизованИХ систем
Різновиди архітектури.
Вимоги до архітектури.
Розподілені системи автоматизації.
Багаторівнева архітектура.
1.1. Різновиди архітектури.
Існує величезна різноманітність датчиків (температури, вологості, тиску, потоку, швидкості, прискорення, вібрації, ваги, натягу, частоти, моменту, освітленості, шуму, об'єму, кількості теплоти, струму, рівня і ін.), які перетворюють фізичну величину в електричний сигнал. Якщо параметри сигналу не узгоджуються з параметрами входу аналого-цифрового перетворювача (АЦП) або не відповідають стандарту (наприклад, вхідною величиною АЦП є напруга в діапазоні 0...10 В, а датчик (термопара) має вихідну напругу в діапазоні від 0 до 100 мВ), то використовують вимірювальний перетворювач (рис. 1.1), який забезпечує нормалізацію сигналу датчика (приведення до стандартних діапазонів зміни, забезпечення лінійності, компенсацію похибки, посилення і тому подібне). Вимірювальні перетворювачі зазвичай суміщають з модулями аналогового введення.
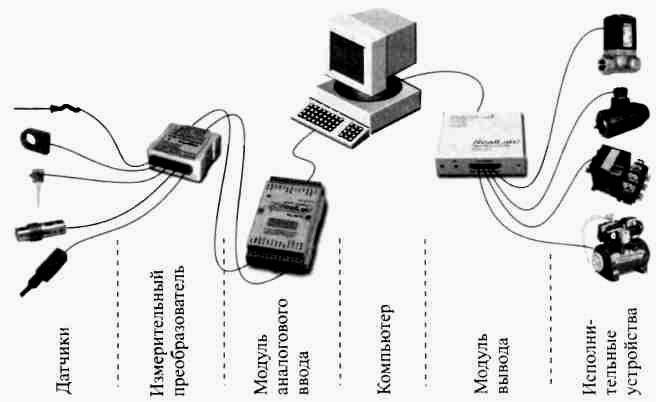
Рис. 1.1. Простий варіант автоматизованої системи з одним комп'ютером, одним пристроєм вводу і одним пристроєм виводу
Для введення в комп'ютер аналогових сигналів служать модулі аналогового вводу (рис. 1.1). Модулі вводу можуть бути загального застосування (універсальні) або спеціалізовані. Прикладом універсального модуля вводу є NL-8AI (www.RealLab.ru), який сприймає сигнали напруги в діапазонах ±150 мВ ±500 мВ ±1В ±5В ±10В і струму в діапазоні ±20 мА.
Окрім модулів аналогового вводу широко поширені модулі дискретного вводу, які не містять АЦП і дозволяють вводити сигнали, що мають два рівні (наприклад, сигнали від кінцевих вимикачів, датчиків відкриття дверей, пожежних датчиків, охоронних датчиків руху і т. п.). Рівні вхідних сигналів модулів дискретного вводу можуть змінюватися в діапазоні, як правило, 0...24 В або 0...220 В. Модулі з входом 220В використовуються, наприклад, для реєстрації наявності напруги на клемах електродвигуна або нагрівального приладу.
Окреме місце займають пристрої рахункового вводу, які мають дискретний вхід і дозволяють рахувати кількість або частоту проходження імпульсів. Їх використовують, наприклад, для вимірювання швидкості обертання валу електродвигуна або підрахунку продукції на конвеєрі.
Комунікації між комп'ютером і пристроями вводу-виводу виконуються через послідовні інтерфейси, наприклад, USB, CAN, RS-232, RS-485, RS-422, Ethernet або паралельний інтерфейс LPT. Іноді пристрої вводу-виводу виконують у вигляді плат, які вставляють безпосередньо в комп'ютер, в роз'єми шини PCI або ISA. Перевагою використання плат є можливість отримання високої пропускної здатності каналів вводу-виводу (понад 10 Мбіт/с), чого важко досягнути при використанні зовнішніх пристроїв із послідовним портом. Недоліком є вищий рівень впливу електромагнітних наведень від комп'ютера і конструктивні обмеження на кількість каналів вводу-виводу.
У автоматизованих системах замість комп'ютера або одночасно з ним часто використовують програмований логічний контролер (ПЛК). Типовими відмінностями ПЛК від комп'ютера є спеціальне конструктивне виконання (для монтажу в стійку, панель, на стіну або в технологічне устаткування), відсутність механічного жорсткого диску, дисплею і клавіатури. Контролери також мають малі розміри, розширений температурний діапазон, підвищену стійкість до вібрації і електромагнітних випромінювань, низьке енергоспоживання, захищені від дій пилу і води, містять сторожовий таймер і плати аналогового і дискретного вводу-виводу, мають збільшену кількість комунікаційних портів. У контролерах, на відміну від комп'ютерів, як правило, використовується операційна система реального часу (наприклад, Windows CE, QNX).
Пристрої виводу (модулі виводу) дозволяють виводити дискретні, частотні або аналогові сигнали. Дискретні сигнали використовуються, наприклад, для увімкнення електродвигунів, електричних нагрівачів, для управління клапанами, засувками, насосами і іншими виконавчими пристроями. Частотний сигнал використовується зазвичай для управління пристроями середньої потужності з великою інерційністю за допомогою широтно-імпульсної модуляції.