

18. Момент количества движения материальной точки и механической системы
Так
как количество движения
 ,
как и сила
,
является
величиной векторной, то момент количества
движения относительно центра и оси
определяется так же, как момент силы
относительно того же центра и оси.
,
как и сила
,
является
величиной векторной, то момент количества
движения относительно центра и оси
определяется так же, как момент силы
относительно того же центра и оси.
Векторный момент количества движения материальной точки относительно некоторого центра О – вектор, приложенный в этом центре и направленный перпендикулярно плоскости векторов и в ту сторону, откуда движение точки видно против хода часовой стрелки.
Это определение удовлетворяет векторному равенству
 ,
,
где – вектор количества движения материальной точки, – радиус-вектор этой точки относительно центра О.
Алгебраический
момент
количества движения материальной точки
относительно некоторого центра О
– скалярная величина, взятая со знаком
«+» или «-» и равная произведению модуля
количества движения
на расстояние h
(перпендикуляр) от этого центра до линии,
вдоль которой направлен вектор
:
 .
.
Моментом
количества движения
(кинетическим моментом) материальной
точки относительно некоторой оси Z
называется скалярная величина
 ,
взятая со знаком «+» или «-» и равная
произведению модуля
,
взятая со знаком «+» или «-» и равная
произведению модуля
 проекции вектора
количества движения на плоскость,
перпендикулярную этой оси, на перпендикуляр
h,
опущенный из точки пересечения оси с
плоскостью на линию, вдоль которой
направлена указанная проекция.
проекции вектора
количества движения на плоскость,
перпендикулярную этой оси, на перпендикуляр
h,
опущенный из точки пересечения оси с
плоскостью на линию, вдоль которой
направлена указанная проекция.
 .
.
Правило знаков: смотрим навстречу оси Z
 –
при
движении точки против хода часовой
стрелки;
–
при
движении точки против хода часовой
стрелки;
 –
то
же по ходу часовой стрелки.
–
то
же по ходу часовой стрелки.
 ,
если
,
если
 ,
т.е вектор
параллелен
оси ОZ;
,
т.е вектор
параллелен
оси ОZ;
 ,
т.е. вектор
пересекает
ось ОZ.
,
т.е. вектор
пересекает
ось ОZ.
Момент количества движения материальной точки относительно оси равен проекции на эту ось момента количества движения материальной точки относительно любого центра, лежащего на этой оси:
 .
.
Для движущейся материальной системы вводится понятие главного момента количеств движения относительно центра О как векторной суммы моментов количеств движения всех точек системы относительно этого центра О:
 .
.
Вводится и понятие главного момента количеств движения относительно оси – как алгебраической суммы моментов количеств движения точек системы относительно этой оси Z:
 .
.
Зависимость между ними аналогична зависимости между соответствующими главными моментами сил.

Е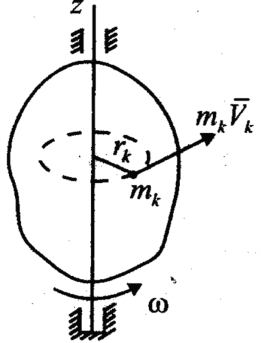 сли
твердое тело (механическая система)
вращается вокруг неподвижной оси Z,
главный момент количеств движения
относительно оси вращения
сли
твердое тело (механическая система)
вращается вокруг неподвижной оси Z,
главный момент количеств движения
относительно оси вращения

Т.е. равен произведению момента инерции тела относительно оси вращения на угловую скорость
19. Теорема об изменении главного момента количеств движения системы. Закон сохранения
Теорема об изменении кинетического момента в векторной форме формулируется так:
Производная по времени от кинетического момента механической системы относительно данного неподвижного центра О равна главному моменту внешних сил относительно того же центра, т.е.
 .
(3.22.1)
.
(3.22.1)
Теорема об изменении кинетического момента механической системы относительно оси заключается в следующем:
Производная по времени от кинетического момента механической системы относительно данной неподвижной оси равна главному моменту внешних сил относительно этой оси, т.е.
 .
.
Законы сохранения кинетического момента механической системы:
1. Если главный момент внешних сил относительно некоторого центра равен нулю, то кинетический момент системы относительно этого центра остается постоянным, т.е.
если
 ,
то
,
то
 .
.
2. Если главный момент внешних сил относительно некоторой оси равен нулю, то кинетический момент системы относительно этой же оси остается неизменным, т.е.
если
 ,
то
,
то
 .
.