

11. Масса и центр масс системы материальных точек
Рассмотрим механическую систему, состоящую из n материальных точек.
М ассой
системы материальных точек называется
физическая величина равная арифметической
сумме масс всех точек, входящих в систему.
ассой
системы материальных точек называется
физическая величина равная арифметической
сумме масс всех точек, входящих в систему.

Масса характеризует инертные свойства системы материальных точек при ее постоянном движении.
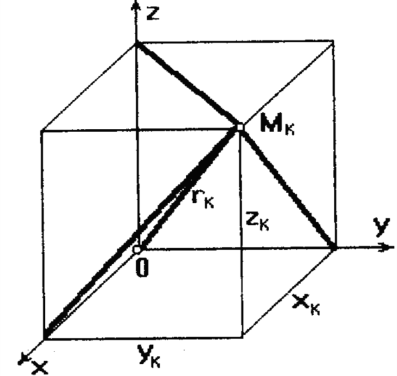
Центром
масс или центром инерции механической
системы называется геометрическая
точка, радиус-вектор
 которой
определяется равенством
которой
определяется равенством
 ,
,
где
 ,
,
 –
соответственно масса и радиус-вектор
k-ой
точки системы.
–
соответственно масса и радиус-вектор
k-ой
точки системы.
Декартовы координаты центра масс определяются формулами:

где
 –
координаты k-ой
точки системы.
–
координаты k-ой
точки системы.
Зависимость между скоростью центра масс и скоростями точек механической системы имеет вид:
 .
.
Зависимость между ускорением центра масс и ускорениями точек механической системы выражается соотношением
 .
.
12. Момент инерции тела. Радиус инерции
При поступательном движении системы мерой ее инерции служит масса, для характеристики инерционных свойств в других случаях движения вводят понятия о моментах инерции системы.
Различают полярные, осевые, планарные и центробежные моменты инерции.
Моментом инерции тела относительно полюса (полярным моментом инерции) называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния этой точки до полюса 0:

 .
.
Моментом инерции тела относительно оси (осевым моментом инерции) называется величина, равная сумме произведений массы каждой точки тела на квадрат расстояния этой точки до оси:
 ;
;
 ;
;
 или
или
 ;
; ;
;
Моментом инерции тела относительно плоскости (планарным моментом инерции) называется величина равная сумме произведений масс каждой точки тела на квадрат расстояния этой точки до плоскости:
 ;
; ;
; .
.
Моментом инерции тела относительно пары координат осей (x,y) (центробежным моментом инерции) называется величина равная сумме произведений масс всех точек тела на их координаты в этих осях:
 ;
;
 ;
;
 .
.
В
отличие от остальных моментов инерции
 ,
,
 ,
,
 могут быть как положительными, так и
отрицательными, а все остальные только
положительными.
могут быть как положительными, так и
отрицательными, а все остальные только
положительными.
Между перечисленными моментами инерции тела существует определенная зависимость:
 ;
;
 ;
;
 ;
;

 .
.
13. Зависимость между моментами инерции относительно параллельных осей (теорема Гюйгенса-Штейнера)
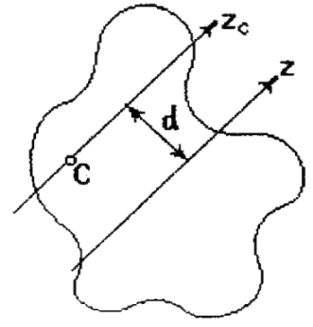
Существует простая связь между моментами инерции твердого тола относительно параллельных осей, одна из которых проходит через центр масс. Эта связь устанавливается теоремой Гюйгенса-Штейнера: момент инерции твердого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси, проходящей через центр масс, сложенному с произведением массы тела на квадрат расстояния между осями:
 .
.
14. Осевые моменты инерции тел простейшей формы
-
№ п/п
Название твердого тела
Вид
твердого тела
Моменты инерции
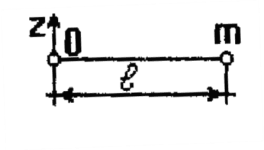
1
Материальная точка массы m

2
Тонкое однородное кольцо
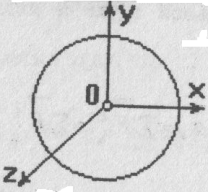

3
Круглый однородный диск массы М и радиуса R
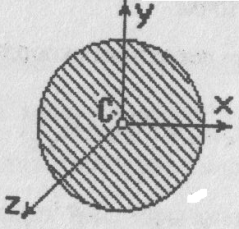
 ,
,
4
Тонкий однородный стержень массы М и длины l
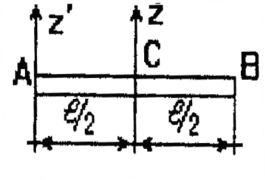
 ,
,
5
Однородная прямоугольная пластина массы М

6
Круглый цилиндр массы М, радиуса R и высотой l

 ,
,