

39. Специальные типы ад, глубокопазный, двухклеточный.
Для получения достаточного пускового момента, возникает задача создания таких асинхронных двигателей с короткозамкнутым ротором, у которых активное сопротивление обмотки ротора при пуске достаточно велико и уменьшается при переходе к нормальному режиму работы. Эту задачу решают путем использования эффекта вытеснения тока в обмотке ротора, применяя обмотку специальной конструкции. Одной из разновидностей таких двигателей являются двигатели с глубокими пазами на роторе. Вытеснение тока в стержнях клетки происходит в результате действия э. д. с, индуктируемых пазовыми потоками рассеяния Фа. Ток в стержне вытесняется по направлению к воздушному зазору, что в сущности и есть проявление поверхностного эффекта в проводниках, утопленных в ферромагнитную среду. Под влиянием вытеснения тока, или поверхностного эффекта, активное сопротивление стержня при пуске двигателя становится большим. По мере разбега двигателя при его пуске частота тока в роторе уменьшается и по достижении номинальной скорости вращения становится весьма малой. При этом э. д. с, индуктируемые потоком Фа, становятся малыми, явление вытеснения тока практически исчезает и ток распределяется равномерно по сечению стержня. Активное сопротивление стержня при этом становится малым, и двигатель работает с хорошим к. п. д. Двухклеточные двигатели имеют на роторе две короткозамкнутые беличьи клетки, одна из которых представляет собой так называемую пусковую обмотку а вторая — рабочую. Сечение стержней пусковой обмотки может быть несколько меньше, чем у рабочей обмотки. Однако сечение и теплоемкость стержней пусковой обмотки должны быть достаточно велики, чтобы предотвратить чрезмерный нагрев этой обмотки при пуске. Иногда рабочую и пусковую обмотки размещают в отдельных пазах. Вращающееся магнитное поле двигателя индуктирует в обеих обмотках ротора одинаковые э. д. с. При пуске вследствие большой частоты тока ротора индуктивное сопротивление рабочей обмотки относительно велико и значительно больше полного сопротивления пусковой обмотки. Поэтому при пуске нагружена током в основном только пусковая обмотка, и ввиду большой величины ее активного сопротивления двигатель развивает большой пусковой момент. При разбеге двигателя частота тока ротора уменьшается, и при нормальной скорости вращения (5 = 0,02 -=- 0,05) индуктивные сопротивления рассеяния обмоток ротора будут в 20—50 раз меньше, чем при пуске. Поэтому в рабочем режиме активные сопротивления обмоток ротора значительно больше индуктивных и полные сопротивления обмотки определяются величинами активных сопротивлений. Вследствие этого при работе двигателя полное сопротивление рабочей обмотки значительно меньше, чем полное сопротивление пусковой, и током нагружена главным образом рабочая обмотка. Ввиду малости активного сопротивления этой обмотки двигатель имеет хороший к. п. д
40. Ам, принцип действия, конструкция, область применения, достоинства и недостатки.
Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором. Статор состоит из шихтованного магнитопровода (2), запрессованного в литую станину (1) . На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки (3). Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов. Фазы обмотки можно соединить по схеме ''звезда'' или "треугольник" в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют "звездой". Если же напряжение сети 220 В, то обмотки соединяют в "треугольник". В обоих случаях фазное напряжение двигателя равно 220 В.
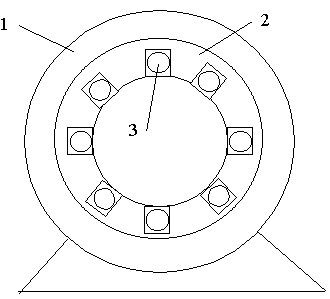
Ротор вращающая часть состоящая из вала, сердечника и обмотки. Сердечник ротора также набирается из отдельных штампованных листов электра – технической стали изолированных друг от друга. По конструкции обмотки ротора делятся на роторы коротко-замкнутые и фазные. У АД с к.з. ротором обмотка ротора состоит из медных стержней замкнутых по торцам медными кольцами (беличье колесо), часто обмотка выполняется заливкой пазов расплавленным алюминием. С фазным ротором обмотка ротора представляет собой трехфазную обмотку соединенную звездой. Выводы обмотки соединены с контактными кольцами закреплены на валу ротора. Кольца и вал изолированы друг от друга, на кольцах наложены щетки расположены в неподвижных щеткодержателях. Принцип действия: режимы работы АД определяется режимом электромагнитного взаимодействия токов в обмотках статора и ротора. При вкл. обмотки статора в сеть трехфазного U возникает вращающее магнитное поле статора, вращающее магнитное поле сцепляется как с обмоткой статора так и ротора и наводит в них эдс. Обмотка ротора замкнута поэтому эдс ротора создает в стержне обмотки ток. Взаимодействие тока ротора с полем статора создает на роторе электромагнитные силы Fм. Направление по правилу левой руки. Силы Fм стараются обернуть ротор в направлении вращения магнитного поля статора. Совокупность сил Fм создает на роторе электромагнитный момент приводящий его во вращения с частотой n2 это частота называется асинхронной n2 < n1. АМ наибольшее распространение получили как двигатели. Это основной двигатель, применяемый в промышленности, сельском хозяйстве в быту, наиболее распространены 0,6 до 400кВт. Достоинства: простота конструкции (отсутствия коллектора), простота в обслуживании, надежность, дешивизна. Недостаток: относительная сложность и не экономичность регулирования эксплуатационных характеристик.