

3.1. Автоколіматор ак-і.
Автоколіматор АК-1 призначений для вимірювання малих кутів нахилу дзеркадьно-відбиваючих плоских поверхонь, а також для встановлення площин паралельно або перпендикулярно одна до одної, вимірювання відхилень від прямолінійності або площинності.
Тонічна характеристика.
І. Ціна поділки шкали компенсатора, сек 1
2. Ціна поділки — мінутної шкали в полі зору, мін 1
3. Поле зору автоколіматора, град 2
4. Фокусна віддаль об’єктива, мм 250
5. Збільшення труби 20
6. Границі вимірювання мін., не менше: при віддалі
до дзеркала до 2 м 12
при віддалі до дзеркала до З0 м О,8
Основними вузлами автоколіматора (рис.12) є магнітна основа 2 і зорова труба і з автоколімаційним пристроєм, закріплена . в держаці 6. Труба має можливість нахилятись у вертикальній і повертатись в горизонтальній площинах за допомогою гвинтів 517 відповідно. Маховиком 4 здійснюється рух секундної шкали окуляромікрометра 3 з окулярною насадкою 6 відносно мінутної шкали. В комплект приладу входить дзеркало з вмонтованою трубкою, вісь якої перпендикулярна дзеркалу. Принципова схема дії автоколіматора приведена на рис. 13. Пучок світла від джерела .світла І» який знаходиться в фокусі конденсатора 2, за допомогою конденсатора і світлофільтра 3 освітлює марку 4 І потрапляє на призму-куб 5. Відбившись від напівпрозорої грані куба світло направляється на об’єктив 6. Розгорнута відстань від авто колімаційної марки до об’єктива 5 дорівнює фокусній відстані останнього, тому промені виходять з об’єктиву паралельними пучками і, відбившись від джерела або дзеркальної поверхні деталі, повертаються у фокальну площину об’єктива. В фокальній площині об’єктива розміщено оптичний окуляр-мікрометр в склад якого входять лінзи компенсатора 7 та сітки 8 і 9, в площині яких утворюється автоколімацій не зображення, яке розглядається через окуляр 10 і призму 11. На нерухомій сітці 8 нанесена мінутна шкала а дванадцятьма ' поділками. Па сітці 9 нанесена секундна шкала з 60 поділками. Сітка 9 міцно пов’язана з додатньою лінзою компенсатора і разом з нею може рухатись в напрямку, перпендикулярному до осі спостерігання, тобто вверх-вниз відносно-мінутної шкали. Якщо дзеркало або поверхня деталі встановлена перпендикулярно до осі автоколіматора, то зображення марки співпаде з віссю приладу 2 на кут α (рис.15), то відбитий промінь повернеться в автоколіматор під кутом 2α і зображення марки зміститься від осьового положення на величину ε.

Рисунок 11

Рисунок 12 –
автоколіматор АК-1
Рисунок 14
Рисунок 13 –
Принципова схема дії АК-1

Рисунок 15
Рисунок 16
ε=![]()
де f — фокусна віддаль об'єктива автоколіматора;
h — різниця висот двох сусідніх контрольованих точок;
l — крок вимірювання.
Похибка вимірювання автоколіматором, визначається за формулою:
=![]()
де А — коефіцієнт, який залежить від ціни поділки автоколіматора (для ціни поділки 2 А=-40);
l — крок вимірювання, м;
L — довжина контрольованої поверхні, м;
H — відхилення від прямолінійності, мкм.
3.2. Оптична лінійка ИС-36 М.
Оптична лінійка ИС-36 М призначена для контролю величини відхилення від прямолінійності плоских і інших поверхонь. Прилад дозволяє проводити вимірювання відхилень від прямолінійності повірочних лінійок, плит, поверхонь направляючих верстатів, твірних валів і т.д.
Технічна характеристика.
1. Границі вимірювання .відхилень від прямолінійності, мм:
а) по відліковому пристрою 0,4
б) гарфічним пристроєм 0.0
2. Границі довжин вимірювання, мм 200/160
3. Ціна поділки відлікового пристрою при збільшенні, мм:
а) відлікового пристрою (0,0015 + 0.01h)
б) графічного пристрою (0,0025 + 0,01h)
де h — відхилення в мм. 1000х
6. Масштаби реєстрації, крат:
а) вертикальний 1000х
б) горизонтальний 1х
Принцип дії оптичної лінійки базується на вимірюванні відхилень профілю реальної поверхні від профілю вихідної прямої. заданої променем, який проходить через центри дзеркадьно-лінзоввих об’єктивів, утворюючи фокальну авто колімаційну систему. Принципова оптико-механічна схема лінійки приведена на рис. 16. Пучок променів від лампочки 6, проходячи через призму 5, лінзу 4, призму 17 І ліву половину куба 12, освітлює марку 2 і через дзеркально-лінзові об’єктиви І ІЗ, утворює зображення марки 2 на польовій діаграмі 3. Мікрооб’єктив II переносить збільшене зображення марки 2 в площину бісекторної сітки 7. Проекційний окуляр 9 проектує бісектор 1 зображення марки 2 в площину екрана, суміщену з об’єктивом 8. Об’єктиви 1 і 13 утворюють автоколімаційну афокальну систему із збільшенням. Афокальна система має таку властивість, що відстань повздовж осі системи між предметом (маркою 2) і його зображенням (в площині бісекторної сітки 7) постійна і не залежить від положення предмета на осі. Тому зображення марки при переміщенні вимірювальної каретки повздовж осі завжди залишається різким на екрані проекційного окуляра. Зміщення щупа 18 каретки, яке виникає внаслідок непрямолінійності контрольованого профілю викликає зміщення зображення марки (візирного штриха) відносно зображення бісектора. Це зміщення виміряють за-допомогою гвинтового окулярного мікрометра 10 з ціною поділки 0,001 мм. Основними вузлами приладу е корпус 14 ,вимірювальна каретка, яка рухається по контрольованій поверхні на роликах 16 і 19. В корпус вмонтована оптична частина приладу, а каретка несе в собі освітлювальну і вимірювальну його частини. В верхній частині каретки встановлено проекційний мікроскоп, який складається з мікрооб’єктива 11, гвинтового окулярного мікрометра 10 і проекційного окуляра. В цей окуляр входить об’єктив 9 Із збільшенням 3х і плосковипуклий об’єктив 8.
Для встановлення лінійки на контрольовану площину використовують опори 15 і 20. Одну з них регулюють по висоті.
Опори забезпечують трьохконтантне встановлення лінійки на контрольовану площину.
Оптична лінійка має реєструючий пристрій для запису профілограми профілю на міліметровому папері. Похибка вимірввання лінійки ИС-36 визначається за формулою =(1,2 + 4,5*10-3Н),мкм,
де Н — відхилення від прямолінійності, мкм.
3.3. Сферометр ИЗС-7.
Сферометр ИЗС-7 призначений для вимірювання радіусів кривизни опуклих і ввігнутих сферичних поверхонь в межах від 10 до 1000 мм.
Технічна характеристика.
І. Границі вимірювання, мм 10+1000
2. Ціна поділки лінійної шкали, мм 0,1
3. Ціна поділки колової ткали, мм 0,001
4. Діаметри вимірних кілець, мм 15; 21;З0; 42;
відповідно № 7;№ 6;№ 5;№ 4;№ 2;№ 1 85; 120
вимірних кілець
5. Діаметри кульок вимірних кілець, мм 2.42;2,42
відповідно № 7; №6; № 5;№ 4;№ 3;№ 2;№ 1 4.69;6.34;
вимірних кілець 10.25;10.26
В основу дії сферометра покладено контактно-кільцевий метод вимірювання висоти шарового сегменту сферичної поверхні 9а допомогою міліметрової шкали приладу. Радіус кривизни окремих сферичних поверхонь визначають за формулами:
Rвп=![]() (для
опуклої поверхні)
(для
опуклої поверхні)
Рисунок 17 –
Сферометр ИЗС-7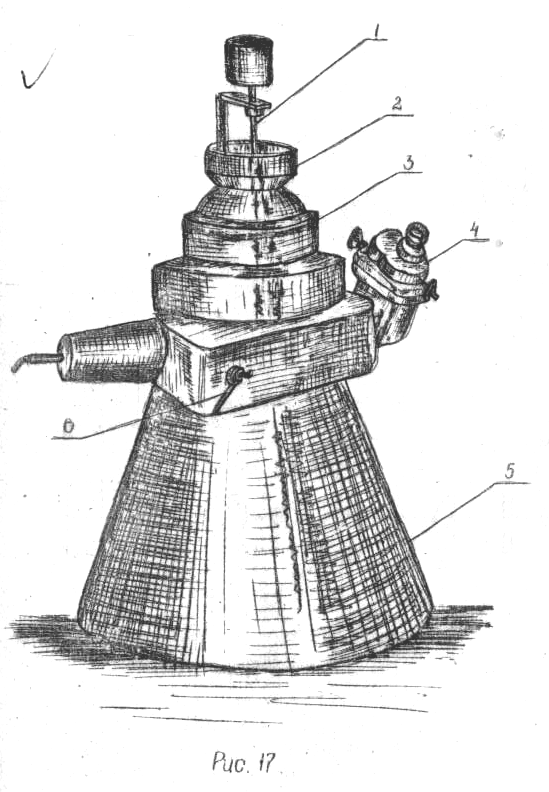

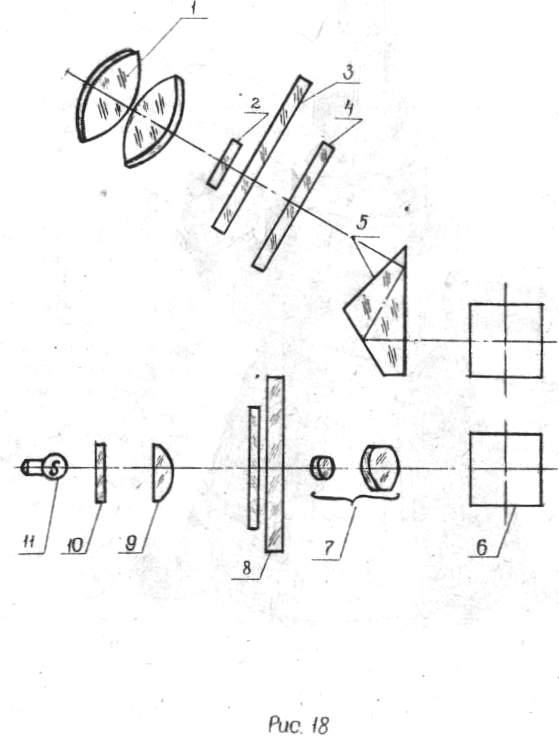
Рисунок 18 – Оптична
схема сферометра ИЗС-7
Rвг=![]() (для
ввігнутої поверхні)
(для
ввігнутої поверхні)
де r — радіус застосованого вимірного кільця;
h1; h2 — виміряні сферометром висоти шарового сегмента відповідно опуклої і ввігнутої сферичних поверхонь,
— радіус кульки вимірного кільця.
Загальний вигляд сферометра приведено на рис. 17.
Всередині литого чавунного корпуса 5 знаходиться вимірний стальний стержень Із скляною міліметровою шкалою, який під
дією вантажу постійно прагне піднятись догори і дотягнутись до поверхні контрольованої деталі 2. Вимірний стержень затискуючим гвинтом може бути закріплений в любому положенні по висоті Для відведу вимірного стержня вниз застосовується важіль — арретир 6. На площадку в верхній частині корпуса встановлюють вимірні кільця 3 закріпленими в них трьома. кульками. Вироби з малою масою притискають до вимірного кільця упором І Справа на корпусі розміщено випромінювальний спіральний мікроскоп 4, по якому визначають висоту шарового сегмента сферичної поверхні.
Оптична схема сферометра приведена, на рис. 18.
Промені від джерела світла II через світлофільтр 10 і конденсатор 9 освітлюють міліметрову шкалу 6. Об’єктив 7 проектує зображення міліметрової шкали через призму 6, 5 і захисне скло 4 в площину шкали десятих долей міліметра 2-ї колової шкали З, на якій нанесені подвійні витки Архімедової спіралі. Зображення шкал спостерігають через окуляр І.
3.4. Кругломір мод. ВЄ-20А.
Прилад для вимірювання відхилень від круглості ВЕ-20А базується на радіальному методі контролю 1 призначений для перевірки відхилень від правильного кола будь-якого, перпендикулярного .до осі, січення зовнішніх і внутрішніх поверхонь деталей типу тіл обертання. Технічна характеристика,
І. Граничні розміри контрольованих деталей, мм:
а) зовнішній діаметр до 250
б) внутрішній діаметр 3+260
в) висота деталі будь-якої форми 360
г) висота деталі типу вала 0 до 95 мм 650
2. Найбільша, віддаль контрольованого січення від торця, мм200
З. Похибка обертання шпинделя, мкм 0,15
4. Збільшення електронного блоку, крат 125*10000
5. Швидкість обертання шпінделя,
діаграмного диска паперу об/хв. 2.4
6. Швидкість руху діаграмного паперу, мм/хв. 20;40; 80;200; 400;600;
7. Ширина поля запису, мм:
а) в полярних координатах ЗО
б) в прямокутних координатах 70
Кругломір ВЕ-20А (рис.19) складається з окремо виготовлених вузлів: стояка А, центруючого столика Б, вимірної головки В, електронного блоку Г, записуючого приладу Д, встановлених на столі Е.
Вимірна головка складається з привода і, шпиндельного вузла 5 та вузла датчика 6 і переміщається по столику за допомогою гвинта 4 і стопориться гвинтами 8. Каретка з датчиком обертається разом з шпинделем при обертанні рукоятки З і переміщається в напрямку, перпендикулярному до осі шпинделя за допомогою гвинта 12. В заданому положенні каретка фіксується гвинтом 10. Точне виставлення датчика при зафіксованій каретці виконують за допомогою гвинта її мікрометричного механізму. Обертом рукоятки 13 вмикається механічне обертання шпинделя.
Центруючий столик рухається в двох взаємоперпендидулярних напрямках в горизонтальній площині при обертанні гвинтів 15 швидкого переміщення і 14 повільного переміщення. Для закріплення і попереднього центрування контрольованої деталі в пазах столика закріплено опорно-центруючий механізм, який складається з призми 16 і опорно-пружинного механізму 17.
Встановлення необхідного режиму роботи приладу здійсняється перемикачами 9, 18, 19, 20.
Принцип роботи приладу базується на точному обертанні шпинделя і (рис.20,а), на якому закріплена каретка 2 з індуктивним датчиком. Биття шпинделя порівняно мале (менше 0,15 мкм для ВЕ-20А) і тому траєкторію його руху можна прийняти за правильне коло або еталон круглості (рис.20,б). Таким чином, при обертанні шпинделя і каретка 2,а також наконечник щупа датчика, описують правильне коло. Якщо вісь контрольованої деталі З і вісь обертання шпинделя і співпадають, то при дотиканні наконечника щупа з деталлю за один оберт шпинделя буде записано фактичний профіль поперечного січення деталі в відповідному радіальному збільшенні. Співвісність осі обертання шпинделя і осі деталі забезпечується центруючим столиком 4. Для електричної частини приладу базується на принципі перетворення лінійних переміщень вимірного наконечника датчика в зміну напруги індуктивним методом. Блок-схема кругломіра ВЕ-2ОА приведена на (рис. 21). Електрична частина приладу складається із датчика, електронного блоку 9 і записуючого приладу 10. Магнітна система датчика складається з 3-подібного осердя 7 з двома котушками 5. Котушки датчика і дві половини первинної обмотки вхідного трансформатора 8 утворюють балансний міст, живлення якого здійснюється від генератора звукової частоти б.
При вимірюванні наконечник щупа безпосередньо дотикається до поверхні деталі на протязі одного оберта шпинделя. Відхилення форми поверхні деталі через щуп і спеціальний важіль викликають коливання якоря 3 відносно осердя 7, що викликає зміну напруги на виході трансформатора. Отримана зміна напруги підсилюється електронним блоком 9, на вихід якого від’єднується записуючий 10, а при необхідності і показуючий прилади.

Рисунок 19 –
Кругломір ВЕ-20А
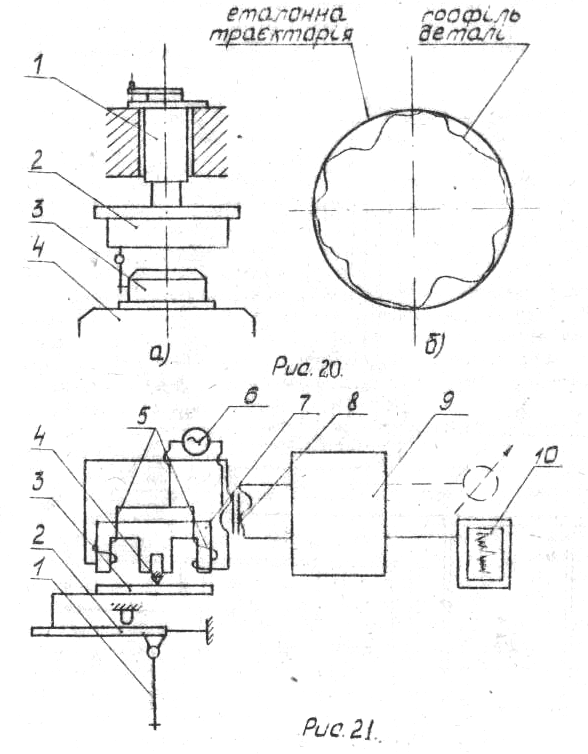
Рисунок 21 –
Блок-схема кругло міра ВЕ-20А
Рисунок 20