

23. Датчики углового положения и абсолютные шифраторы. Способы увеличения точности, диапазона преобразования.
П рименяются
в машиностроении при необходимости
задать координаты положения резца. Они
позволяют определить положение детали
в данный момент.
рименяются
в машиностроении при необходимости
задать координаты положения резца. Они
позволяют определить положение детали
в данный момент.
Необходимо поддерживать температуру бруска. Это выполняет пиром-р. Он равномерно сканирует брусок. Задачу, какую горелку включать, решает шифратор.
Ш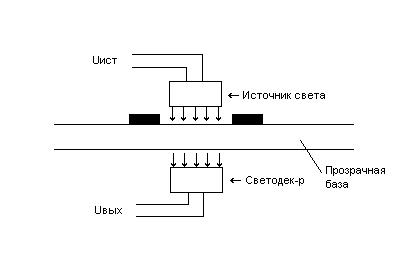 ифраторы
необходимы для определения абсолютной
координаты положения объекта, для
определения линейного приращения
координаты объекта, для определения
движения координаты объекта (причём с
большой точностью). Эти шифраторы
используют оптическое считывание.
ифраторы
необходимы для определения абсолютной
координаты положения объекта, для
определения линейного приращения
координаты объекта, для определения
движения координаты объекта (причём с
большой точностью). Эти шифраторы
используют оптическое считывание.
Когда свет проходит через прозрачные промежутки, то он регистрируется и поступает импульс, если свет идет через непрозрачные участки, то импульса нет.
 Много
поворотных шифраторов используются в
качестве датчиков положения. Одноповоротный
дисковый шифратор снабжается редуктором,
который снабжён устройством для подсчётов
числа оборотов. За один оборот диск
может получить 8192 отсчёта, закодировать
их в 13-ти разрядный код, 12 разрядов
используются для подсчёта числа оборотов
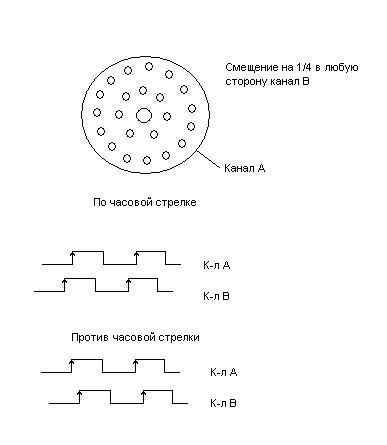
– 4096. Датчик получается 25-ти разрядным.
Чем больше разрешающая способность,
тем больше частота. Считываемые сигналы
А и В подвергаются обработке.
Много
поворотных шифраторов используются в
качестве датчиков положения. Одноповоротный
дисковый шифратор снабжается редуктором,
который снабжён устройством для подсчётов
числа оборотов. За один оборот диск
может получить 8192 отсчёта, закодировать
их в 13-ти разрядный код, 12 разрядов
используются для подсчёта числа оборотов
– 4096. Датчик получается 25-ти разрядным.
Чем больше разрешающая способность,
тем больше частота. Считываемые сигналы
А и В подвергаются обработке.
Повышение точности в два раза:

24 .Назначение и характеристика as-интерфейса.
AS-i интерфейс для подключения датчиков и ее исполнительных устройств
Его назначение — заменить все требующиеся линии и соединения 2-хпроводной передающей средой. Если есть 2 провода к которым подключаются какие-либо устройства, то эти устройства должны использовать 2-хпроводное соединение или метод доступа.









Связь по AS интерфейсу выполняется так: существует единое устройство ведущее — мастер (Master) и определенное количество ведомых устройств (Slave).
Метод доступа: мастер выполняет циклический опрос всех ведомых устройств и получает от них ответы, т. е. идет режим «запрос-ответ».
В качестве ведомых устройств: датчики, передающие информацию и исполнительные устройства на которые передаются команды для исполнения.
В качестве исполнительных устройств: задвижки и клапаны на магнитных пускателях, включение насосов.
Существует ограничение: длина линии передачи не больше 100 метров, но как и во всяких устройствах можно поставить повторитель (не больше 2х), тогда структура получается не больше 300 метров.
Ведомых устройств: 31, в другой версии 62 устройства.
Ш
Master ина:
ина:








Кольцевая шина:
Master


















Протокол: прередача ведется асинхронно — состоит в передаче стартовых битов.
Сообщение к ведущему устройству включает: запрос к ведущему устройству, паузу ведущего устройства, затем ответ ведомого устройства и паузу ведомого устройства.




1бит
St — стартовый бит.
St стартовая позиция всегда нулевая
Sb — управляющий бит
если он нулевой — запрос данных, параметра адреса (или приписывается значение — какие должны быть 0 или 1).
если он равен 1 — запрос команды.
A4 — A0 адрес ведомого запускающего устройства.
I4 — I0 биты данных
PB — бит защиты (количество единиц должно быть четным)
CRC — защита циклическом кодом
011001011110 нечетное а должно быть четным
0110010111101 четное значение
Высокая помехозащищенность обеспечивается: малой длинной сегмента и кадра.
EP — бит «стоп» мастер запроса или (вызов закончен). Он всегда равен единице.
Его формат — 2 бита, 1.5 бита, 1 бит.
У ведомого устройства: стартовый бит, биты данных, бит защиты, пауза ведомого устройства.
Если ведомое устройство было синхронизировано (не было помех), то оно может передавать ответ через 3 тактовых интервала.
Если перед этим происходит сбой (не совсем готово к приему),то оно может предавать ответ через 5 тактовых интервалов.
Если предали запрос а ответа нет, то следует: установить паузу тактового сигнала сделать 10, если ответа за это время нет то Master считает что запрос не дошел. Для этого ожидание и используется пауза.
С точки зрения быстродействия длина тактового интервала 6 мкс. Полный цикл опроса 31 ведущих устройств выполняется за 5 мс т.е. за 1 с — 200 раз устройство может получить команду (данные) если 61 ведомых то 10мс.
Подключить простые датчики к AS-i не получится. Есть датчики, которые можно подключить напрямую к AS-i интерфейсу (они снабжены микросхемой) и есть датчики, которые не снабжены специальной микросхемой, они могут через модули расширения подключиться к AS-i интерфейсу, а еще допускают подключение через другие порты. т.е. они являются устройствами сопряжения.
Структура односегментного AS-i.
Ведущее устройство
Источник питания
AS-i

повторитель






Микросхема AS-i
датчик
Модуль AS-i
Микросхема
Исп.
У-во
Модуль AS-i




датчик
Исполнительный
механизм
Если мало данного сегмента, то к нему нужно поставить повторитель ( он использует оптронную развязку) и продлить схему.
Наличие оптронной развязки требует: нельзя передать напрямую источник сигнала, т.к. Там идет металлическая развязка. Кроме повторителя есть еще и удлинитель. Если источник питания расположен на расстоянии больше 100м — используются удлинители.
Не могу быть:
1 повторитель и 1 удлинитель.
2 или больше повторителей
напротив удлиннителя включать нельзя (на входе) только со стороны выхода



С


 о
стороны выхода:
о
стороны выхода:

С
 о
стороны входа:
о
стороны входа:
















