

17. Векторные диаграммы для представления гармонических колебаний. Дифференциальное уравнение гармонических колебаний. Энергия колебательного движения.
Векторные диаграммы для представления гармонических колебаний.
Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени.
Гармонические колебания - колебания, при которых колеблющаяся величина изменятся со временем по закону синуса (косинуса).
Гармонические колебания описываются уравнением типа:
x =A cos (0 t +) ,
где
x – смещение колеблющейся точки от положения равновесия.
А - максимальное значение колеблющейся величины, называемое амплитудой колебания,
0 - круговая (циклическая) частота,
- начальная фаза колебания в момент времени t=0,
(0 t +) - фаза колебания в момент времени t.
Гармонические колебания изображаются графически методом вращающегося вектора амплитуды, или методом векторных диаграмм.
Для этого из произвольной точки О, выбранной на оси x под углом , равным начальной фазе колебания, откладывается вектор А, модуль которого равен амплитуде А рассматриваемого колебания.
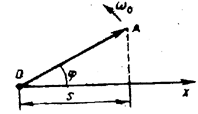
Если этот вектор привести во вращение с угловой скоростью 0, равной циклической частоте колебаний, то проекция конца вектора будет перемещаться по оси x и принимать значения от -А до +А , а колеблющаяся величина будет изменяться со временем по закону s =A cos (0 t +). Таким образом, гармоническое колебание можно представить проекцией на некоторую произвольно выбранную ось вектора амплитуды А, отложенного из произвольной точки оси под углом , равным начальной фазе, и вращающегося с угловой скоростью 0 вокруг этой точки.
Дифференциальное уравнение гармонических колебаний материальной точки.
, или , где m – масса точки, k – коэффициент квазиупругой силы (k=mw2).
Решение:
кинематическое уравнение гармонических колебаний
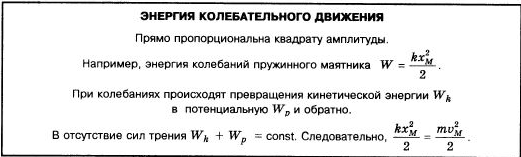
Энергия колебательного движения.
Динамика гармонических колебаний:
18. Пружинный и физический маятники.
Пружинный маятник
Колебательная система в этом случае представляет собой совокупность некоторого тела и прикрепленной к нему пружины. Пружина может располагаться либо вертикально (вертикальный пружинный маятник), либо горизонтально (горизонтальный пружинный маятник).
![]()
где ах – ускорение, m - масса, х - смещение пружины, k – жесткость пружины.
Это уравнение называют уравнением свободных колебаний пружинного маятника. Оно правильно описывает рассматриваемые колебания лишь тогда, когда выполнены следующие предположения:
1)силы трения, действующие на тело, пренебрежимо малы и поэтому их можно не учитывать;
2) деформации пружины в процессе колебаний тела невелики, так что можно их считать упругими и в соответствии с этим пользоваться законом Гука.
Закон Гука, устанавливает линейную зависимость между упругой деформацией твердого тела и приложенным механическим напряжением. Напр., если стержень длиной l и поперечным сечением S растянут продольной силой F, то его удлинение = Fl/ ES, где E — модуль упругости (модуль Юнга).
Свободные колебания пружинного маятника имеют следующие причины.
1. Действие на тело силы упругости, пропорциональной смещению тела х от положения равновесия и направленной всегда к этому положению.
2. Инертность колеблющегося тела, благодаря которой оно не останавливается в положении равновесия (когда сила упругости обращается в нуль), а продолжает двигаться в прежнем направлении.
Выражение для циклической частоты имеет вид:
![]()
где w - циклическая частота, k - жесткость пружины, m - масса.
Эта формула показывает, что частота свободных колебаний не зависит от начальных условий и полностью определяется собственными характеристиками самой колебательной системы — в данном случае жесткостью k и массой m.
![]()
Это выражение определяет период свободных колебаний пружинного маятника.
Физический маятник
Физический маятник - твердое тело, совершающее колебания в гравитационном поле вокруг горизонтальной оси подвеса, расположенной выше его центра тяжести.
Положение равновесия:
Основной закон динамики вращательного движения:
I – момент инерции
![]()