2. Криволинейное движение. Нормальное и тангенсальное ускорения.
Криволинейные движения – движения, траектории которых представляют собой не прямые, а кривые линии. По криволинейным траекториям движутся планеты, воды рек.
Криволинейное движение – это всегда движение с ускорением, даже если по модулю скорость постоянна. Криволинейное движение с постоянным ускорением всегда происходит в той плоскости, в которой находятся векторы ускорения и начальные скорости точки. В случае криволинейного движения с постоянным ускорением в плоскости XOY проекции vx и vy ее скорости на оси Ox и Oy и координаты x и y точки в любой момент времени t определяется по формулам:
![]()
![]()
![]()
![]()
Частным случаем криволинейного движения – является движение по окружности. Движение по окружности, даже равномерное, всегда есть движение ускоренное: модуль скорости все время направлен по касательной к траектории, постоянно меняет направление, поэтому движение по окружности всегда происходит с центростремительным ускорением.
![]() где r – радиус
окружности.
где r – радиус
окружности.
Вектор ускорения при движении по окружности направлен к центру окружности и перпендикулярно вектору скорости.
При
криволинейном движении ускорение можно
представить как сумму нормальной
![]() и тангенциальной
и тангенциальной
![]() составляющих:
составляющих:
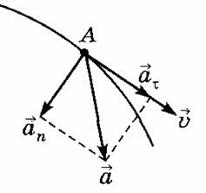
![]()
- нормальное (центростремительное) ускорение, направлено к центру кривизны траектории и характеризует изменение скорости по направлению:
![]()
v – мгновенное значение скорости, r – радиус кривизны траектории в данной точке.
- тангенциальное (касательное) ускорение, направлено по касательной к траектории и характеризует изменение скорости по модулю.
Полное ускорение, с которым движется материальная точка, равно:
![]()
3. Движение точки по окружности. Угловые перемещение, ускорение, скорость. Связь между линейными и угловыми характеристиками.
Частным случаем криволинейного движения – является движение по окружности. Движение по окружности, даже равномерное, всегда есть движение ускоренное: модуль скорости все время направлен по касательной к траектории, постоянно меняет направление, поэтому движение по окружности всегда происходит с центростремительным ускорением.
где r – радиус окружности.
Вектор ускорения при движении по окружности направлен к центру окружности и перпендикулярно вектору скорости.
Кроме центростремительного ускорения, важнейшими характеристиками равномерного движения по окружности являются период и частота обращения.
Вращательное движение тела или точки характеризуется углом поворота, угловой скоростью и угловым ускорением.
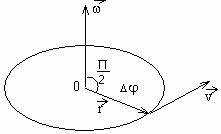
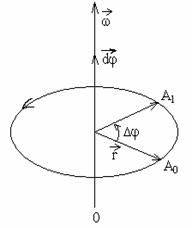
Угол поворота φ - это угол между двумя последовательными положениями радиуса вектора r, соединяющего тело или материальную точку с осью вращения. Угловое перемещение измеряется в радианах.
Угловая скорость (w) – векторная физическая величина, показывающая, как изменяется угол поворота в единицу времени и численно равная первой производной от угла поворота по времени, т.е
.
![]()
Направление
вектора угловой скорости
![]() совпадает с направлением вектора
углового перемещения,
т.е. вектора, численно равного углу φ и
параллельного оси вращения; оно
определяется по правилу буравчика: если
совместить ось буравчика с осью вращения
и поворачивать его в сторону движения
вращающейся точки, то направление
поступательного перемещения буравчика
определит направление вектора угловой
скорости. Точка приложения вектора
произвольна, это может быть любая точка
плоскости, в которой лежит траектория
движения. Удобно совмещать этот вектор
с осью вращения.
совпадает с направлением вектора
углового перемещения,
т.е. вектора, численно равного углу φ и
параллельного оси вращения; оно
определяется по правилу буравчика: если
совместить ось буравчика с осью вращения
и поворачивать его в сторону движения
вращающейся точки, то направление
поступательного перемещения буравчика
определит направление вектора угловой
скорости. Точка приложения вектора
произвольна, это может быть любая точка
плоскости, в которой лежит траектория
движения. Удобно совмещать этот вектор
с осью вращения.
При равномерном вращении численное значение угловой скорости не меняется, т.е. ω = const. Равномерное вращение характеризуется:
- периодом вращения Т, т.е. временем, за которое тело делает один полный оборот, период обращения измеряется в с;
- частотой, измеряемой в Гц и показывающей число оборотов в с;
![]()
- круговой (циклической,угловой) частотой (это та же самая угловая скорость).
![]()
Угловая скорость может меняться как по величине, так и по направлению. Векторная величина, характеризующая изменение угловой скорости в единицу времени и численно равная второй производной от углового перемещения по времени, называется угловым ускорением:
![]()
Если положение и радиус окружности, по которой происходит вращение не изменяется со временем, то направление векторов углового ускорения и угловой скорости совпадают, если вращение ускоренное, и противоположны, если вращение замедленное.
При
равномерном движении по окружности
тангенциальная составляющая ускорения
равна нулю, т.е. модуль линейной скорости
постоянен и определяется соотношением
![]() Но т.к. направление скорости постоянно
изменяется, то существует нормальное
ускорение
Но т.к. направление скорости постоянно
изменяется, то существует нормальное
ускорение
![]() Т.о., линейная скорость
Т.о., линейная скорость
![]() направлена по касательной к окружности
в каждой точке по движению; ускорение
направлена по касательной к окружности
в каждой точке по движению; ускорение
![]() перпендикулярно скорости и направлено
к центру кривизны.
перпендикулярно скорости и направлено
к центру кривизны.
Связь между линейными и угловыми величинами, характеризующими движение
Отдельные точки вращающегося тела имеют различные линейные скорости v, которые непрерывно изменяют свое направление и зависят от угловой скорости ω и расстояния r соответствующей точки до оси вращения. Точка, находящаяся на расстоянии r от оси вращения проходит путь ΔS = rΔφ. Поделим обе части равенства на
![]() Переходя к пределам
при
Переходя к пределам
при
![]() , получим
, получим
![]() или
или
![]() .
.
Таким
образом, чем дальше отстоит точка от
оси вращения, тем больше ее линейная
скорость. По определению ускорения,
![]() или
или
![]()
![]()
что значения линейной скорости, тангенциального и нормального ускорений растут по мере удаления от оси вращения. Формула устанавливает связь между модулями векторов v, r, ω, которые перпендикулярны друг к другу.