

28. Блоки преобразователей фаз аэп с векторным управлением ад
П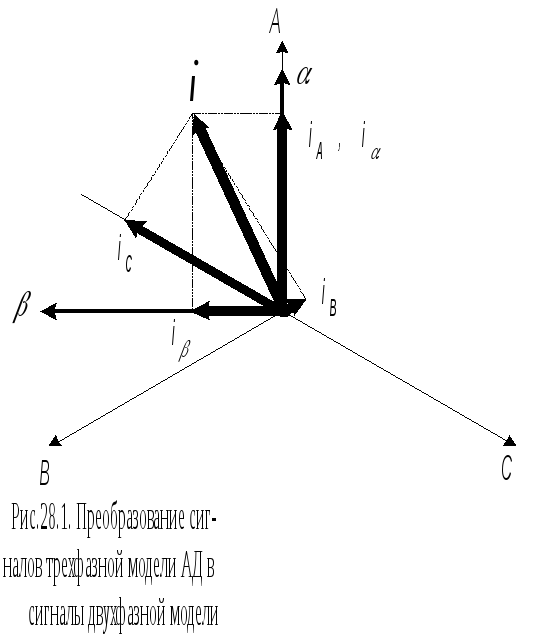 реобразователи
фаз ПФ
служат для преобразования сигналов
трехфазной модели АД в осях АВС в сигналы
двухфазной модели в осях α-β
и наоборот. Для вывода формул преобразования
используем обобщенный вектор, например,
тока
реобразователи
фаз ПФ
служат для преобразования сигналов
трехфазной модели АД в осях АВС в сигналы
двухфазной модели в осях α-β
и наоборот. Для вывода формул преобразования
используем обобщенный вектор, например,
тока
![]() (рис.28.1). Понятие обобщенного вектора
дано в теме 21. Проекциями на трехфазные
оси являются мгновенные значения токов
фаз iA,
iB
и iC,
а проекциями на оси α-β
будут токи iα
и iβ.
(рис.28.1). Понятие обобщенного вектора
дано в теме 21. Проекциями на трехфазные
оси являются мгновенные значения токов
фаз iA,
iB
и iC,
а проекциями на оси α-β
будут токи iα
и iβ.
Уравнения преобразования фаз можно записать в трех видах, которые отличаются друг от друга условием сохранения (инвариантностью) при преобразовании некоторой характеристики, вычисляемой через сигналы в разных осях. В таблице 28.1 приведены формулы преобразования в зависимости от вида инвариантности.
Выполним вывод формул преобразования из условия инвариантности обобщенных векторов, а для остальных случаев инвариантности можно воспользоваться формулами из табл.28.1.
Таблица 28.1
Формулы преобразования типа (α-β) ← (АВС)
|
Инвариантность Характеристика |
… обобщенных векторов |
… мощностей |
… электрических амплитуд |
|
iα |
|
|
iA |
|
iβ |
|
|
|
|
|
|
1 |
|
Преобразователи фаз типа (α-β) ← (АВС)
Проектируем вектора токов iA, iB и iC на оси α-β (рис.28.1), находим суммы проекций и приравниваем суммы токам iα и iβ.
 (28.1)
(28.1)
где использована подстановка iB+iC=-iA, вытекающая из условия iA+iB+iC=0.
Преобразование для напряжений и и потокосцеплений Ψ имеет вид, аналогичный (28.1).
Преобразователи фаз в системе векторного управления должны работать по условию инвариантности мощностей с тем, чтобы при переходе от сигналов в осях α-β, сформированных системой управления, к сигналам трехфазной системы АВС мощность АД не изменялась. При преобразованиях (28.1) имеем:
 (28.2)
(28.2)
В преобразователях
по условию инвариантности мощностей
нужно токи и напряжения в осях α-β
изменить в
![]() раз, а преобразования сигналов типа
(α-β)
← (АВС)
должны проводиться по формулам
раз, а преобразования сигналов типа
(α-β)
← (АВС)
должны проводиться по формулам
 (28.2)
(28.2)
В формулах (28.2) используются три тока iA, iB и iC. Если на вход преобразователя подведено два фазных тока, например, iА и iВ, (именно по два сигнала заведено на входы преобразователя ПФ2), то для описания работы преобразователя фаз подстановкой iC=-iА-iB исключаем ток iС и получим
 (28.3)
(28.3)
Именно по таким формулам работает ПФ2 для токов.
ПФ3 обеспечивает преобразование по формулам типа (28.3) сигналов ΨμА и ΨμВ, поступающих с датчиков Холла, установленных под полюсами фаз А и В двигателя.
Преобразователи фаз типа (АВС) ← (α-β)
Такой преобразователь на схеме один – ПФ1. На вход его поступают сигналы задания напряжений u1α.зад и u1β.зад, сформированные системой управления, а на выходе образуются сигналы задания uА.зад, uВ.зад и uС.зад для преобразователя частоты ПЧ.
Формулы преобразования находятся как решение относительно переменных uA, uB и uC матричного уравнения (28.3):
 (28.4)
(28.4)