

Вопросы и задания
1. Какие типы периодических переменных используются в описании электромеханических процессов АД ? Как привести их к одному типу ?
2. Приведите катушечную модель АД. Поясните способ формирования потокосцепления каждой из обмоток АД.
3. Составьте выражение потокосцепления любой катушки АД (кроме катушки 1А).
4. Приведите систему дифференциальных уравнений физических обмоток АД.
5. Назовите и обоснуйте недостатки математической модели АД в физических переменных.
6. Почему система дифференциальных уравнений физических обмоток АД является нелинейной ?
21. Двухфазная модель ад в раздельных осях статора и ротора
1-й и 2-й недостатки математической модели АД в физических переменных устраняются путем перехода к модели АД, в которой статор и ротор представлены в виде двух взаимно перпендикулярных катушек.
В основе двухфазной модели лежит понятие вращающегося обобщенного вектора. Вектор некоторой совокупности физических сигналов называется обобщенным, если его проекции на выбранные оси являются мгновенными значениями физических сигналов.
На рис.21.1 в верхнем ряду показаны оси трех- и двухфазных обмоток, а в нижнем – эквивалентирование обмоток статора и ротора.
Двухфазные оси
α-β
статора неподвижны в пространстве,
причем ось α
совмещена с осью обмотки 1А
статора. Двухфазные оси d-q
ротора вращаются в пространстве вместе
ротором с частотой ωЭЛ,
причем ось d
совмещена с осью обмотки 2А
ротора. Обобщенный вектор потокосцепления
![]() (или напряжения, или тока) вращается в
пространстве с частотой ω1
напряжения питания статора АД. Проекции
(или напряжения, или тока) вращается в
пространстве с частотой ω1
напряжения питания статора АД. Проекции
![]() на оси обмоток статора являются
мгновенными значениями потокосцеплений
этих обмоток, что доказывается вычислениями
по построениям на рис.21.1:
на оси обмоток статора являются
мгновенными значениями потокосцеплений
этих обмоток, что доказывается вычислениями
по построениям на рис.21.1:
![]() (21.1)
(21.1)

Проекции
![]() на оси α-β
являются мгновенными значениями
потокосцеплений по этим осям, что
доказывается вычислениями:
на оси α-β
являются мгновенными значениями
потокосцеплений по этим осям, что
доказывается вычислениями:
![]() (21.2)
(21.2)
Можно утверждать
обратное, что потокосцепления трехфазных
обмоток, определяемые формулами (21.1), и
потокосцепления двухфазных обмоток,
определяемые формулами (21.2), дают одно
и то же результирующее потокосцепление
![]() статора. Значит, после подмены реальной
трехфазной обмотки на двухфазную с
взаимно-перпендикулярными осями α
и β,
результирующее потокосцепление статора,
которое вращается в пространстве с
частотой ω1,
работа АД не изменится.
статора. Значит, после подмены реальной
трехфазной обмотки на двухфазную с
взаимно-перпендикулярными осями α
и β,
результирующее потокосцепление статора,
которое вращается в пространстве с
частотой ω1,
работа АД не изменится.
Точно также можно заменить трехфазную обмотку ротора, а также многофазную обмотку короткозамкнутого ротора, на двухфазную обмотку с взаимно-перпендикулярными осями d и q. Потокосцепления таких обмоток согласно рис.21.1 вычисляются по формулам:
![]() (21.3)
(21.3)
Теперь можно составить систему дифференциальных уравнений для АД с двухфазными обмотками статора и ротора
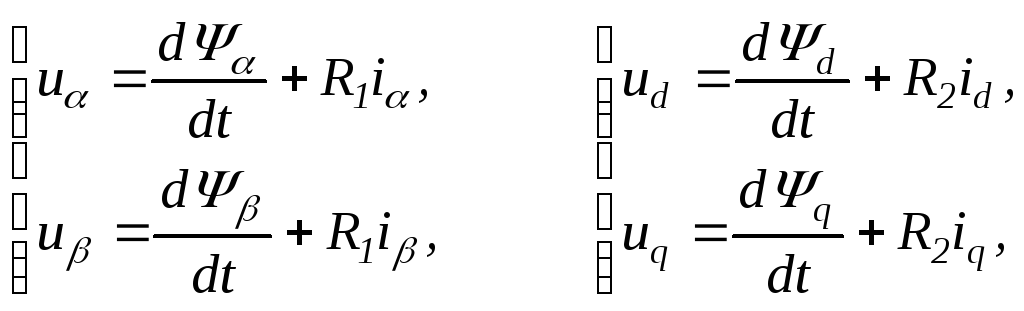 (21.4)
(21.4)
где суммарные потокосцепления Ψα, Ψβ, Ψd и Ψq всех четырех двухфазных обмоток с учетом построений на рис.21.1 определятся формулами:
 (21.5)
(21.5)
Напряжения питания uα, uβ, ud и uq двухфазных обмоток изменяются с частотами трехфазного АД - в статоре с частотой ω1, в роторе с частотой ω2.
Преимущества двухфазной модели АД с раздельными осями статора (оси α-β) и ротора (оси d-q):
1) количество дифференциальных уравнений обмоток уменьшилось до 4-х (в трехфазной модели 6 уравнений);
2) количество слагаемых в выражениях полных потокосцеплений обмоток уменьшилось до 3-х (в трехфазной модели 6 слагаемых).
Недостаток только один: выражения потокосцеплений (21.5) являются нелинейными функциями, поэтому и дифференциальные уравнения (21.4) также нелинейные. Решить эти уравнения аналитически невозможно.