

ms_lec
.pdfдозволяє робити висновок про рівень організації (дезорганізації) системи, прогнозувати в ймовірнісному змісті її реакцію на той або інший вплив. Сюди входить також характеристика інформаційних потоків і дані про алгоритми взаємодії елементів. Четвертий вид опису системи пов’язаний з характеристикою процесів зародження системи та еволюцією її розвитку в історичному плані – генетико-прогностичний опис. Розглянемо послідовно вимоги до змісту всіх перерахованих описів.
8.2. Функціональний опис
Першим по значимості можна вважати функціональний опис, тому що будь-яка система насамперед цікава місцем, яке вона займає серед інших систем і об’єктів у навколишньому світі, та своїми функціями.
Функціональний опис виходить із цільових функцій (однієї або декількох) системи. Як приклади простих функцій визначимо наступні:
−пасивне існування;
−матеріал для інших систем;
−обслуговування систем більш високого порядку;
−протистояння іншим системам;
−перетворення інших систем і зовнішнього Середовища і т.д.
Для систем високого порядку формулювання єдиної “глобальної” цільової функції
представляє складну неоднозначну задачу; її вирішення залежить |
від |
одночасного виконання |
|
декількох |
локальних функцій, найчастіше взаємозалежних, а |
іноді і взаємовиключних. |
|
Наприклад, |
для живих систем глобальною функцією |
є |
функція “забезпечення |
життєдіяльності”, досягнення якої можливо при якісному виконанні процесів життєдіяльності всіх органів і фізіологічних систем організму у відповідних умовах зовнішнього Середовища. На виконання локальних та глобальних функцій можуть впливати зовнішні і внутрішні протидіючі фактори, на які система зобов’язана реагувати, щоб вижити. Однак функції системи виконуються доти, поки її характеристичні параметри і параметри зовнішнього Середовища змінюються у визначених межах, поза якими система руйнується або істотно змінює свої властивості.
Як уже було відзначено, функціональний опис повинен містити дані про призначення системи, її відношення до інших систем, її контакти з навколишнім світом, напрямок можливих змін функції. Він відображає зв’язок зовнішніх впливів на систему з її реакцією, відповіддю, поведінкою, впливом на елементи системи.
Послідовність дій при виконанні системою деякої функції відображає зміст закону поведінки, що залежить від процесів, що протікають всередині системи (тобто законів внутрішнього функціонування), і від процесів, в яких задіяна вся система в рамках метасистеми (тобто від законів зовнішнього функціонування). Закон поведінки відображає зв’язок реакції (відповіді, дії) системи на впливи. У загальному випадку можливо декілька одночасних впливів, а загальна реакція системи може бути виражена в сукупності поведінкових актів. Тому цей зв’язок виражається системою нелінійних рівнянь виду:
yj = fj (x1, x2, …, xn, u1, u2, …, ur),
де yj – вихідний сигнал на j-му виході системи; j = 1,m; x1, x2, …, xn – вхідні сигнали; u1, u2, …, ur – характеристичні параметри системи; fj – функціонал, що зв’язує сигнал на j-му виході з вхідними сигналами і визначальними параметрами.
Функціональний опис всієї системи складається з опису зовнішніх функцій, процесів і характеристичних параметрів, що визначають закони зовнішнього функціонування, які відображають поведінку системи в зовнішньому Середовищі, і ефективність виконання своїх функцій.
Під ефективністю визначається деякий інтегральний показник якості реагування, що пов’язує якість поведінки з витратами внутрішніх ресурсів системи (під ресурсами визначаються запаси енергії, що система може витратити на здійснення поведінкового акта без
61
збитку для свого існування), якими вона володіє. Чим менше витрати у відповідь на вплив, тим вище ефективність системи. Тут доречно згадати про відомий принцип Ле-Шателье, який стверджує: “якщо на будь-яку систему, що знаходиться в стаціонарному режимі, подіє зовнішнє збурювання, то в ній відбудуться зміни, що зменшать результат його дії”. Зрозуміло, що це зменшення відбудеться за рахунок використання внутрішнього ресурсу системи (для кожної системи він індивідуальний), що також зменшиться. Якщо взяти до уваги, що кожна система має обмежений ресурс, то можна зробити висновок про те, що будь-який вплив, зменшуючи ресурс, зменшує можливості системи “опору” впливам. А значний вплив (або одночасний вплив багатьох факторів) може призвести до вичерпання ресурсу і до загибелі системи. Такі представлення дозволяють визначити “запас міцності” системи як різницю між повним і тим ресурсом, який використовується, і мету удосконалення системи – підвищення повного ресурсу (запасів внутрішньої енергії) за рахунок більш ефективного функціонування при мінімізації витрат енергії на відповідні реакції.
Закони зовнішнього функціонування виконуються, якщо всі її елементи-підсистеми також виконують свої функції. Тому для системи варто розрізняти закони внутрішнього функціонування, які характеризують поведінку окремих елементів-підсистем, з яких складається система. Кожна підсистема сама містить набір елементів, що виконують свої частки функції, тому закони внутрішнього функціонування системи одночасно є законами зовнішнього функціонування для будь-якої підсистеми цієї системи – закони зовнішнього функціонування першого нижнього рівня. Закони внутрішнього функціонування залежать від функцій підсистем першого рівня, процесів, що протікають всередині системи, і параметрів підсистем. Показники якості виконання функцій першого рівня впливають на ефективність усієї системи. Поведінка елементів підсистем буде вже описуватися законами внутрішнього функціонування першого нижнього рівня, що, у свою чергу, є законами зовнішнього функціонування другого нижнього рівня і т.д. Таким чином, у міру просування всередину системи функціональний опис включає все нові рівні організації і нові морфологічні структури. Впливи зовнішнього Середовища можуть виявлятися на будь-якому рівні функціонального опису і побічно викликати зміни ефективності всієї системи [25].
На кожному рівні системи її стан (а, отже, і закони функціонування, системи, підсистеми, елементи підсистем і т.п.) визначається значеннями характеристичних параметрів, параметрів складових її елементів, положенням у просторі, а також значеннями їх похідних. Значення параметрів і їх похідних можуть змінюватися в часі та у просторі, що означає перехід системи з одного стану в інший.
Системи, здатні змінювати стан під впливом керуючих впливів, стають динамічними, тобто здатними до руху (у широкому контексті) – змін взагалі, всяких взаємодій з іншими об’єктами. Якщо похідні дорівнюють нулю, динамічна система переходить у стан спокою і стає статичною.
Таким чином, повний функціональний опис системи можна представити як структуру вкладених один в один та ієрархічно побудованих описів різних рівнів її розгляду.
Функціональний опис може задаватися деяким оператором Gφ [25]:
Gφ={T, X, x, Y, y, Q, q, φ},
де Т – множина моментів часу, в які отримані дані для побудови функціонального опису; Х – множина значень припустимих вхідних впливів; х – конкретні значення впливів з Х; Y – множина значень відповідних реакцій системи; у – конкретні реакції з Y; Q – множина можливих станів; φ – перехідна функція стану, q – один із станів, що характеризує заданий момент часу.
Оператор Gφ може бути представлений в алгебраїчній, логічній, диференціальній, інтегрально-диференціальній формі, що входить у скалярне, векторне або матричне керування. Він складається на підставі виміру зовнішніх характеристик (принцип “чорного ящика”: вивчення зв’язку “вплив – реакція”) або на підставі знання структури системи. Представлення про структуру системи можна отримати з морфологічного опису [25].
62

8.3. Морфологічний опис
Морфологічний опис дозволяє визначити склад елементів підсистем, зв’язки та структуру системи. Розбиття системи на частини (декомпозиція) є одним з перших кроків при побудові морфологічного опису. При цьому мають значення тільки ті властивості частин, які визначають їх взаємодію з іншими частинами системи. Розбивка системи на елементи та виділення підсистем спрощує дослідження всієї системи і, отже, спрощує її формальний опис. Додаткові складності виникають, коли реалізація тієї або іншої структури описується ймовірнісними законами. Ці обставини є основною причиною, що виключає строгий і повний опис
дуже складних і понадскладних систем. |
|
|
|
|
|
|
|
||
Для уявлення про |
основні властивості |
структури морфологічний опис може бути |
|||||||
здійснений на декількох рівнях (причому ці рівні відповідають рівням |
функціонального |
опису), |
|||||||
тобто |
морфологічний опис також ієрархічний. |
При |
цьому |
на |
різних |
рівнях |
можуть |
||
використовуватися принципово інші способи опису. Наприклад, для організму тварини |
на рівні |
||||||||
органів |
використовуються |
фізіологічні методи, |
на |
клітинному |
рівні – дані |
мікроскопічних |
|||
досліджень (мікрофізіологічні методи), для опису |
процесів |
у внутрішньоклітинних структурах |
|||||||
– методи біохімічного аналізу і т.д. |
|
|
|
|
|
|
|
||
Морфологічний опис включає кілька груп властивостей і представляється у вигляді оператора Gм:
Gм = {PS, V, σ, K},
де PS – множина елементів (підсистем), V – множина зв’язків, σ – множина типів зв’язків, тобто структур, К – види композицій.
Морфологічний опис починається з характеристики елементного складу, що може бути гомогенним (містити однотипні елементи), гетерогенним (містити різнотипні елементи) і змішаним. Потім досліджуються властивості елементів, які можуть класифікуватися за змістом, ступенем свободи, ступенем спеціалізації, часом активної участі у виконанні функції.
За змістом виділяють інформаційні, енергетичні, речовинні і змішані елементи. За ступенем спеціалізації вони можуть бути призначені для однотипних, близьких (суміжних) і різнотипних функцій. За ступенем свободи у виконанні функцій їх розділяють на програмні, адаптивні та ініціативні, а за часом дії – на регулярні, безперервні, нерегулярні і змішані. Елементи системи можуть розрізнятися за походженням і бути фізичними (механічними, електричними, термодинамічними та ін.), хімічними, біологічними і змішаними.
Рис. 8.1. Структура морфологічного опису
Прагнення до спрощення опису змушує поєднувати елементи системи, що самі можуть бути досить складними утвореннями. Розрізняють наступні типи підсистем [25]:
63
− ефекторні, здатні перетворювати керуючі впливи і впливати речовиною, енергією або інформацією на інші підсистеми, сусідні системи та середовище;
−рецепторні, здатні перетворювати зовнішні впливи в інформаційні сигнали;
−рефлексивні, здатні відтворювати всередині себе процеси впливу на інформаційному
рівні;
− невизначені, котрі не можуть бути точно віднесені до жодного з перерахованих вище
типів.
При визначенні ступеня впливу одних підсистем на інші важливого значення набуває поняття “лідер”. Лідируючою підсистемою є та, котра, не маючи детермінованого впливу з боку якої-небудь підсистеми, керує більшою кількістю інших підсистем. Найчастіше таку лідируючу функцію виконують рефлексивні підсистеми. Можливі формальні (призначені відповідно до виконуваної функції) і неформальні лідери. Відомі задачі, для рішення яких визначення лідера здобуває вирішального значення, наприклад, в економічних або соціологічних системах.
Наступною частиною морфологічного опису є характеристика виду відносин між елементами всередині системи і між усією системою і середовищем.
Відомі наступні види відносин:
−подібність, або відношення схожості, збігу істотних властивостей різних систем;
−аналогія, яка характеризує відповідність, що виявляється в деяких їх істотних
ознаках, властивостях, структурах, функціях систем;
−гомоморфізм, при якому кожну частину (і відношення) у системі S1 можна відобразити на деяку частину системи S2;
−ізоморфізм, коли кожній частині (і відношенню) у системі S1 можна поставити у відповідність деяку частину системи S2;
−зв’язок, при якому визначені виходи системи (або підсистеми) S1 одночасно є входами якого-небудь елемента (підсистеми) системи S2.
Перші чотири види відносин використовуються в системних дослідженнях при порівнянні систем різного типу з метою виявлення загальних принципів їх організації. Для характеристики конкретної системи більше підходить аналіз, за допомогою якого з’єднуються елементи в системі і система з зовнішнім середовищем.
Зв’язки оцінюють по змісту як інформаційні, енергетичні, речовинні та змішані і по їх спрямованості як прямі, зворотні та нейтральні. Якість зв’язку між елементами можна оцінити пропускною здатністю і надійністю каналів зв’язку. Пропускна здатність каналу зв’язку визначається як максимальний обсяг речовини, енергії або інформації, що може пропустити канал зв’язку за одиницю часу. Надійність зв’язку залежить від величини та імовірності помилок перетворення і передачі речовини, енергії або інформації.
Особливо необхідно виділити прямі і зворотні зв’язки. Прямі зв’язки призначені для передачі речовини, енергії, інформації або їх комбінацій від одного елемента до іншого відповідно до послідовності виконання функцій елементами, що приводить до досягнення цільової функції системи. Зворотні зв’язки в основному виконують контролюючу функцію для забезпечення якості керування процесами; їх спрямованість протилежна напрямку виконання функції. Найбільш поширені інформаційні зворотні зв’язки. Наявність подібних зв’язків
характерна для адаптивних систем, здатних пристосовуватися до зовнішніх умов, що змінюються, або цілеспрямовано змінювати ці умови.
Під структурою визначається множина всіх відносин між елементами всередині даної системи; вона характеризує внутрішню організацію, порядок і побудову системи і визначається набором елементів, а також відносин між ними. Один і той самий об’єкт може бути включений у декілька систем і може визначати декілька структур, виконуючи при цьому в загальному випадку різні функції. Але той самий об’єкт може бути визначено декількома структурами. Структурні властивості систем визначаються характером і стійкістю відносин між елементами. По характеру відносин можна виділити багатозв’язні, ієрархічні (багаторівневі) і змішані структури. Для ієрархічних структур характерна наявність керуючих (командних) елементів. В ієрархічних структурах керуючі функції розподілені між всіма елементами або групами елементів.
Наявність ієрархії, як правило, є ознакою високого рівня організації; такі структури більш економічні і у функціональному відношенні.
64
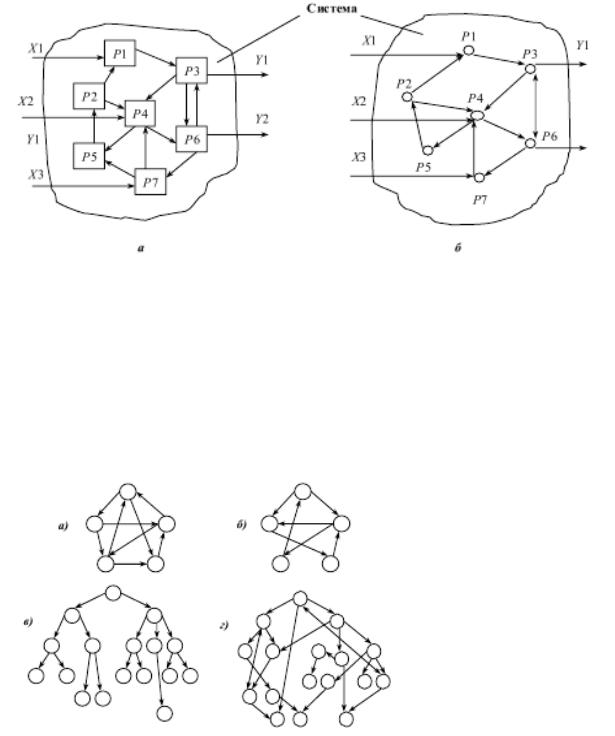
Для наочного представлення пристрою систем на практиці знайшли застосування різні способи відображення, з яких найбільше поширення одержали блок-схема (варіанти: структурна схема або функціональна) і граф системи (рис. 8.2). При відображенні структури системи у виді блок-схеми її елементи відображаються у вигляді прямокутників, всередині яких записуються ідентифікатори елементів. Прямокутники поєднуються стрілками, що вказують напрямок передачі впливів і сигналів між елементами.
Рис. 8.2. Блок схема системи ( a ) і граф системи ( б ).
Кожен елемент може мати в загальному випадку зв’язок з будьяким іншим елементом цієї системи. Деякі з елементів можуть мати входи або виходи для зв’язку з зовнішнім Середовищем. Відображення структури у вигляді графа використовує інші позначення: крапкою (кружком) відображаються елементи системи, а стрілками – зв’язки між ними. У ряді задач подібне відображення структури більш зручно для аналітичних і графічних методів дослідження характеристик систем.
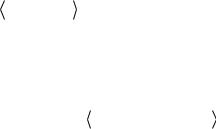
На рис. 1.6 наведені приклади графів різних типів структур: багатозв’язних (а, б), ієрархічної (в) і змішаної (г) структур.
Рис. 8.3. Приклади графів систем
Стійкість міжелементних відносин характеризує стабільність розташування елементів у просторі. Найбільш стійкі детерміновані структури, тобто такі, у яких відносини або незмінні, або змінюються за деяким відомим законом. В імовірнісних (стохастичних) структурах відносини між елементами описуються імовірнісними законами. Існують також хаотичні структури, у яких
65
міжелементні відносини є непередбаченими для будь-якого моменту часу, тобто будь-які відносини можуть існувати з рівною імовірністю. Властивості структури залежать від внутрішніх ресурсів, властивостей елементів і зв’язків [25].
Поняття “структура” включає також поняття конфігурації системи – просторове розташування елементів, геометричних властивостей. Розрізняють крапкову, лінійну, площинну, об’ємну і змішану конфігурації.
8.4. Інформаційний опис
Розглянутий вище |
опис, здавалося б, повинен дати вичерпну інформацію |
про |
досліджувану систему про |
призначення, структуру, закони поведінки, про усі прояви системи в |
|
зовнішньому навколишньому Середовищі. Однак роль інформаційного опису як самостійної характеристики системи не можна зменшити. І це визначається насамперед значенням інформаційного забезпечення функціонування систем, теорії інформації та інформатики для опису процесів, що протікають у системі, і помилок функціонування, розуміння принципів побудови, організації і функціонування, особливостей взаємодії систем у зовнішньому Середовищі і підсистем у самій системі. Інформаційний опис дозволяє оцінити організованість (або неорганізованість) системи, характеризує циркулюючі в системі інформаційні потоки, визначає впорядкованість системи і, отже, висвітлює здатність системи прогнозувати свою майбутню поведінку та оцінити перспективи вдосконалювання. Щоб система існувала, взаємодіяла із середовищем, воно повинно обмінюватися з нею інформацією. Обмінний процес, що відображає взаємодію підсистем і зв’язаний з передачею речовини, енергії й інформації в кількостях окремих квантівпорцій, значимо помітних для взаємодіючих підсистем, визначається як метаболізм. Розрізняють інформаційний, речовинний і енергетичний метаболізм, що разом складають повний метаболізм системи [25].
Функціональні процеси в складній системі тісно пов’язані з інформаційними. Джерелом інформації для функціонування системи є підсистеми і зовнішнє Середовище. Зміст інформації складають усі можливі дані (повідомлення) про об’єкти-передавачі інформації, представлені у вигляді конкретної системи символів, що розрізняються підсистемами-приймачами цієї інформації. Повідомлення відображають за допомогою носія-сигналу, що представляється у формі речовини або енергії шляхом зміни (модуляції) параметрів сигналу. За допомогою сигналів між підсистемами здійснюється обмін інформаційними повідомленнями. Один сигнал при використанні для модуляції декількох його параметрів здатний передавати кілька повідомлень.
Сигнали передаються через зв’язки між підсистемами, для характеристики яких можна ввести такі показники, як [25]:
− вірність передачі – міра відповідності прийнятого повідомлення переданому;
−перешкодостійкість – здатність системи протистояти шкідливому впливові перешкод;
−швидкість передачі – кількість інформації J, переданої через лінію зв’язку між джерелом
іприймачем повідомлень в одиницю часу.
Теоретично досяжна максимальна швидкість передачі інформації є вже показником відповідної лінії зв’язку і визначає її пропускну здатність:
C = lim J/T = J max/T,
де Т – час передачі всіх повідомлень за один сеанс зв’язку.
Оскільки виконання тієї або іншої функції пов’язано із взаємодією підсистем, то показники якості залежать від параметрів інформаційних потоків, якими обмінюються підсистеми. Тому характеристика цих потоків входить в інформаційний опис системи.
Інформаційний опис тісно пов’язаний з іншим не менш важливим поняттям –”ентропія” – міра невизначеності випадкової величини з кінцевим числом результатів n, обумовлена як кількість інформації J, що приходиться на один символ повідомлення в середньому. Величина ентропії Н залежить від апріорної імовірності (pі) перебування системи в кожному з n можливих станів. Кількість інформації, яка отримується при реалізації і-го стану (тобто апостеріорна імовірність і-го стану pі * = 1), дорівнює: Ji = log pі, тому величина Н розраховується як
66
H = – pі log pі.
Ентропія є речовинною ненегативною величиною, обмеженою зверху; вона служить апріорною характеристикою і розраховується по так званому статистичному ряду, що характеризує імовірності реалізації різних станів системи. При цьому чим більше n, тим у більшому ступені майбутнє системи залежить від випадковості. При рівних імовірностях усіх можливих станів система цілком дезорганізована, тому що у всякий момент часу вона може перейти в будь-який стан. Про такі системи говорять, що вони мають максимальну ентропію. Підвищення впорядкованості означає збільшення залежності між факторами, що визначають поведінку системи, вигляд кращих станів, що приводить до прогнозованості її поведінки. Стосовно до зовнішніх випадкових факторів необхідною умовою появи можливості прогнозування поведінки системи є наявність моделі середовища в системі (принцип “відображення Середовища”) [25].
Найбільше значення інформаційний опис має для складних систем, особливо для тих з них, морфологія і функціонування яких підлеглі імовірнісним законам. Реалізацію конкретної морфологічної структури або конкретної реакції на зовнішній вплив з визначеної множини можливих структур і реакцій прийнято розглядати як реалізацію деякого повідомлення – події, для яких можна ввести інформаційні представлення. Тому інформаційний опис неможливо розглядати як абсолютно самостійний. У ньому варто розрізняти морфологічну JM і функціональну JФ частини, що легко було б одержати з повних морфологічного і функціонального описів. Однак, незважаючи на це, інформаційний опис є одним з найважливіших для характеристики складних систем. Багато даних, які в нього входять, можна одержати експериментальним шляхом, використовуючи методи інформатики, а потім користуватися ними як самостійною інформацією. Крім того, для хаотичних, слабо структурованих і нестійких систем інформаційний опис часто є єдиним, що дозволяє одержати представлення про властивості подібних систем.
67
МОДЕЛЮВАННЯ СИСТЕМ
ЛЕКЦІЯ 9
ФОРМАЛІЗАЦІЯ ТА МАТЕМАТИЧНЕ МОДЕЛЮВАННЯ СКЛАДНИХ СИСТЕМ НА ТЕОРЕТИКОМНОЖИННОМУ РІВНІ
Приведені принципи математичного моделювання систем. Дано поняття математичної моделі та поняття ізоморфізму моделей. Подаються основні поняття теорії загальних систем. Крім того, розглянуто поняття абстрактних та часових систем, а також динамічних систем. Вивчаються на основі теорії реалізації, питання існування динамічного представлення для відповідним чином визначеної системи.
9.1. Поняття математичної моделі.
9.1.1. Математична модель. Охарактеризувати моделювання, це перш за все вияснити відношення між дослідником, моделлю і оригіналом. В математичному моделюванні важливе значення має абстракція утотожнення, яка дозволяє утотожнити досліджуваний реальний об’єкт з штучно створеною моделлю. При цьому, при моделюванні найбільш сильною формою відношення типу утотожнення є ізоморфізм. Зазначимо, що математична теорія ніколи не досліджує властивості природніх об’єктів як таких: її об’єктом уваги можуть бути лише абстрактні об’єкти, під якими переважно розуміють множини з відношеннями. Отже виходить, що реальний об’єкт – оригінал спочатку замінюється абстрактним об’єктом (моделлю), який моделюється з допомогою іншого моделлю, причому цей абстрактний об’єкт не називають моделлю. В цьому плані відношення моделювання розуміють як ізоморфізм або гомоморфізм між абстрактним об’єктом і моделлю, а фактично між двома моделями.
Принципова риса системного підходу в тому, що на математичній мові можна говорити безпосередньо про природній об’єкт – систему. Це значить, що:
по-перше, реальному об’єкту може відповідати не один абстрактний об’єкт, а практично нескінчений клас таких об’єктів - представлень реального об’єкта у вигляді моделі;
по-друге, фактично модельований алгебраїчний об’єкт має ту ж природу що й модель, тобто і один і другий є множинами з відношеннями.
Нехай r - k -місне відношення на множині M яке визначає сукупність впорядкованих
наборів (кортежів) з k |
елементів множини M такого виду x1, , xk , тобто є r -підмножиною |
декартового добутку: |
r M M M ... M . Довжина такого кортежу це число місць або |
кількість відношень, яке часто позначають верхнім індексом – r k .
Вматематиці моделлю нахивається деяка множина M з заданим на ній набором відношень
{r1, r2 , , rn } , інакше модель це деякий набір, де r1, r2 , , rn – відношення на M . Отже, в даному
r1, r2 , , rn .поданні
68
В даному визначенні напрошується питання: модель чого?, яке виражає деяку якість, властиву певному класу моделей.
9.1.2. Пояття сигнатури. Введемо поняття сигнатури і будемо відрізняти відношення r від його назви R , причому, назві відношення поставимо у відповідність саме це відношення, тобто(R) r . Наприклад, якщо R читається „бути братом”, то (R) – це відношення в конкретній сім’ї або множині людей. Отже, сигнатурою моделі називається набір назв відношень в цій моделі,
причому для кожної назви повинна бути вказана місність відповідного відношення, наприклад так: |
||||||||||
модель |
Μ |
M, r i1 |
, , r im |
має сигнатуру |
R i1 |
, , R im |
, якщо |
Rik |
rik |
для |
|
|
1 |
m |
|
1 |
m |
|
k |
k |
|
довільного k, k 1, m .
Нехай P M – множина різних відношень на множині M (різної місності). Моделлю в сигнатурі називається пара  M ,
M ,  , де M -базова множина моделі, а – ін’єктивне відображення з в P(M ) , яке зіставляє кожній назві відношення R (n) із сигнатури
, де M -базова множина моделі, а – ін’єктивне відображення з в P(M ) , яке зіставляє кожній назві відношення R (n) із сигнатури
відношення r (n) відповідної місності. |
Оскільки, |
вказує зразу сигнатуру , її відображення і |
|||
образ цього відображення |
r i1 , , rim , то в позначенні |
M , |
є більше інформації ніж в |
||
|
1 |
m |
|
|
|
попередньому. Модель в сигнатурі – це конкретна модель, для якої вказано клас споріднених з нею моделей з тою ж сигнатурою.
Сигнатура несе інформацію про саму модель: по ній легко встановити, скільки відношень в даній моделі, взнати, яка їх місність; можемо говорити про однойменні відношення в різних моделях.
Якщо моделі мають суттєво різні сигнатури, вони не можуть порівнюватись.
9.1.4. Ізоморфізм моделей. Розбиття моделей за сигнатурою є найбільш грубою класифікацією. Тому вводять поняття ізоморфізму, яке дозволяє класифікувати моделі більш точно.
Нехай задані дві моделі |
M |
, |
і |
M |
2 |
, |
2 |
в сигнатурі |
R i1 |
, , Rim |
. Ці моделі |
|
1 |
1 |
|
|
|
|
1 |
m |
|
називаються ізоморфними, якщо існує якщо існує така бієкція (взаємно однозначне відображення)
|
|
|
|
|
|
|
|
|||||||||||||
з множини M1 |
на множину |
M 2 , що для кожного k , k 1, m |
|
|
|
|||||||||||||||
|
R(ik ) |
(x , , x |
) |
R(ik ) |
( (x ), , (x |
)), |
|
|
|
|
|
|
|
|||||||
|
k |
1 |
ik |
|
|
k |
|
1 |
|
|
|
ik |
|
|
|
|
|
|
|
|
|
R(ik ) |
( y , , y |
) |
R(ik ) ( 1( y ), , 1(x |
|
)), |
|
|
|
|
|
|||||||||
|
k |
1 |
ik |
|
|
k |
|
|
1 |
|
|
|
ik |
|
|
|
|
|
|
|
для |
будь-яких |
x1, , xi |
M1 |
і |
y1, |
, yi |
M2 . Тут (x) |
є образом |
x елемента |
при |
||||||||||
|
|
|
|
|
k |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
відображенні , |
а 1 ( y) - прообразом |
y |
при тому ж відображенні. Відображення називається |
|||||||||||||||||
ізоморфізмом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Дві сигнатури {Ri1 ,..., Rin } |
і |
2 |
{Q(l1) |
,..., Q(lm) } називаються ізоморфними, якщо існує |
|||||||||||||||
|
|
|
|
|
1 |
1 |
|
m |
|
|
|
1 |
|
m |
|
|
|
|||
така |
бієкція : 1 2 , |
яка |
кожній |
назві відношення з 1 |
ставить у відповідність назву |
|||||||||||||||
відношення тої ж місності з сигнатури 2 . Бієкція називається ізоморфізмом сигнатур. |
|
|||||||||||||||||||
|
Модель M1 , 1 |
в сигнатурі |
1 |
|
квазіізоморфна до моделі M 2 , 2 з сигнатурою |
2 , |
||||||||||||||
якщо існує такий ізоморфізм із 1 в 2 , що моделі M1 , 1 і M 2 , 2 |
ізоморфні в 1 . |
|||||||||||||||||||
( 2 |
- композиція відображень і 2 ). |
|
|
|
|
|
|
|
|
|
|
|||||||||
Ізоморфні (або квазіізоморфні) моделі мають одну і ту ж структуру, причому саме поняття структури розумно визначити як клас всіх ізоморфних (квазіізоморфних) між собою моделей. Тобто структура - це те, що є у всіх ізоморфних (квазіізоморфних) між собою моделей, те що не залежить від природи елементів базової множини, від випадкових назв відношень.
69
9.1.3. Поняття гомоморфізму.
В теорії систем дуже важливо мати спосіб порівняння об’єктів, який дозволяє знаходити в них схожі (гомологічні) частини. Цю роль виконують морфізми.
Нехай задано дві моделі A, і B, , в одній і тій самій сигнатурі . Гомоморфізмом називається таке відображення f : A B , при якому для кожного відношення R (n) із має місце
R(n) (x1 ,..., xn ) R(n) ( f (x1 ),..., f (xn )) , для довільних x1 ,..., xn A .
З допомогою гомоморфізмів можна встановити відповідність між частинами моделей. Отже, може існувати відповідність між довільними підмоделями моделей.
Модель A , називається підмоделлю моделі A, , якщо:
1)A A;
2)для будь-якого R(n) виконується (R(n) ) (R(n) ) .
Конструкція „підмодель” вимагає відрізняти відношення і його ім’я.
Очевидно, що існує канонічне вкладення – гомоморфізм із підмоделі в модел: кожному елементу множини A зіставляється такий самий елемент в множині A . Це універсальний спосіб задання підмоделі з точністю до ізоморфізму. Тому можна стверджувати: якщо існує ін’єктивний
гомоморфізм |
|
u : A, B, , то модель |
A, ізоморфна |
деякій |
підмоделі B , |
||||||||
моделі B, . |
При |
цьому B u( A) , а |
(R(n) (u(x1 ),..., u(xn )) |
тоді |
і тільки |
тоді, коли |
|||||||
(R(n) (x ,..., x |
n |
)) . |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Розглянемо |
пару |
( A, , u) , яка |
утворена з деякої моделі і ін’єктивного |
|
(вкладеного) |
||||||||
морфізму з |
неї |
в |
модель |
B, . |
Будемо вважати пари |
A, , |
u і |
A , , u |
|||||
ізоморфними, |
|
якщо |
існує |
ізоморфізм |
t : A, A , , |
причому |
u t u . |
Клас таких |
|||||
ізоморфних пар називають підмоделлю.
В цьому сенсі підмодель розглядається не як дещо „внутрішнє” , а навпаки, як „зовнішнє”, подібне на „внутрішнє”, при цьому як модель, так і підмодель є цілісними.
Суть підходу, використаного при побудові загальної теорії систем, полягає в тому, що: - основні системні поняття вводяться з допомогою формалізації, тобто, виходячи з словесного опису деякого інтуїтивного поняття і даються точні математичні означення цього поняття, використовуючи мінімальну математичну структуру (мінімум аксіом), яка дозволяє правильно його інтерпретувати;
- спираючись на введені основні поняття, будується математична теорія загальних систем за рахунок використання нових математичних структур, які є необхідними для дослідження різних властивостей системи.
Виходячи з цього, система просто і цілком природно визначається як відношення в теорії множин. Ідея побудови математичної теорії загальних систем на теоретико-множинному рівні повністю відповідає принципу: починати з найменш структурованих, але широковживаних понять, і на їх основі аксіоматично розвивати подальшу математичну теорію. Тому систему визначають в термінах її спостережуваних властивостей, точніше – в термінах взаємозв’язків між цими властивостями, а не тим, чим насправді вони є.
Система визначається як сукупність всіх проявів властивостей об’єкта дослідження, а не як сам об’єкт. Тому використання математики в цій теорії дозволяє розглядати “механізм” (функцію, відношення) як множину, тобто як сукупність усіх правильних комбінацій її компонент.
Для більш конкретного визначення систем різних типів, вводять так звані допоміжні функції. Ці функції відповідають на абстрактному рівні тим відношенням, які переважно мають вид системи рівнянь, якою задають систему. Ці функції дозволяють більш докладно проаналізувати поведінку системи і особливо її еволюцію в часі. Для визначення різних допоміжних функцій вводять допоміжні об’єкти, які називаються об’єктами станів, а їх елементи – станами системи. Поняття стану полягає ось в чому:
70