

Лекция №8
Цель лекции: Изучить порядок составления структурных схем ЛСУ в векторно-матричной форме, понятия управляемости и наблюдаемости.
Задачи лекции:
Порядок составления структурных схем ЛСУ в векторно-матричной форме.
Понятия управляемости и наблюдаемости.
Желаемый результат:
Студенты должны знать:
Порядок составления структурных схем ЛСУ в векторно-матричной форме.
Понятия управляемости и наблюдаемости.
Учебный материал Структурные схемы локальных систем в векторно-матричной форме
Если система имеет сигнал на входе и выходе в векторной форме, то в систему входит несколько исполнительных и корректирующих устройств.
Векторно-матричные уравнения, описывающие динамку системы, по своему написанию ничем не отличаются от соответствующих уравнений объектов. В них входят расширенные матрицы, в которых учитываются уравнения датчиков корректирующих и исполнительных устройств.
Большинство ЛСА можно привести к двум типовым структурам:
(*)
а)
б)
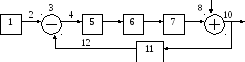
а) с отработкой ошибок от сигналов управления и возмущения,
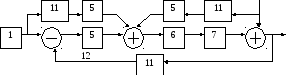
б) с комбинированным управлением и компенсацией ошибок.
На этих схемах управляющий сигнал 2 формируется в задающем устройстве 1. Он сравнивается в устройстве 3 с выходным сигналом, который измеряется датчиком 11.
В результате сравнения сигналов образуется сигнал разности 4, поступающий через устройства управления 5 и 6на объект регулирования 7. От действия сигнала 8, поступающего в систему через сумматор 9, происходит некоторое искажение выходного сигнала 10. Замыкание системы осуществляется главной обратной связи 12.
На рисунке (*), исключив задатчик, получим систему автоматической стабилизации, отрабатывающей сигнал возмущения.
Система на (*) под б) отличается тем, что в ней для получения более высокой точности применяются три 11-ых датчика, которые не только измеряют выходной сигнал 10, но и сигналы управления 2 и возмущения 8. Эти два сигнала, после прохождения устройства 5, поступают на сумматор 13 и уменьшают влияние сигналов на ошибку ЛСА.
Практически все ЛСА при решении задач синтеза и анализа сводится к этим двум схемам. При этом пользуются правилами преобразования структурных схем. Выделяют: линейную часть, нелинейную и цифровую части.
На ряду с передаточными функциями линейных элементов, используют эквивалентные передаточные функции дискретных нелинейных элементов. Для однозначных нелинейностей они совпадают с коэффициентами гармонической линеаризации.
Так как в современные ЛСА входят управляющие ЭВМ, то необходимо, для реализации вычислительных процедур, строить дискретные модели. Для определения дискретных моделей необходимо пользоваться последовательными реализуемыми на ЭВМ специальными программами.
Управляемость и наблюдаемость
Управляемость и наблюдаемость линейных и нелинейных замкнутых систем относятся к основным понятиям ТАУ, позволяющим оценивать правильность выполнения структурных преобразований. При этом следует иметь в виду, что управляющие сигналы g(t) должны переводить систему из любого начального состояния в установившееся за конечное время tk (управляемость), и по выходному сигналу x(t) однозначно определить её начальное состояние (наблюдаемость).
Сформулируем понятие управляемости и наблюдаемости для любых систем, в которых протекают изменяемые во времени процессы x(t), эти процессы называются управляемыми, если на каждую переменную состояния y(t) можно целенаправленно воздействовать с помощью сигнала g(t) в течение конечного времени.
Если переменная состояния не зависит от управления g(t), то отсутствует возможность требуемого её изменения во времени, и она является неуправляемой.
Процесс g(t) называется наблюдаемым, если каждая переменная состояния процесса обуславливает изменение некоторых выходных переменных.
Графы состояний (1)
а)

б)
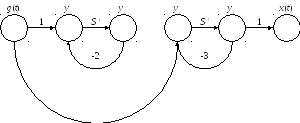
На рисунке (1) изображена схема состояний процесса с 2-мя переменными y1 и y2.
а) не полностью управляемой системой граф состояния,
б) не полностью наблюдаемой системы граф состояния.
Так как входной сигнал g(t) воздействует не только на переменную y1(t), то переменное состояние y2(t) является не полностью управляемым или не управляемым.
Под пунктом б) изображена схема, соответствующая состоянию наблюдаемого процесса. Переменная состояния y2(t) не связана с выходной переменной x(t), поэтому, если x(t) измерена, то можно определить переменную y(t), поскольку y1(t) = x(t).
Однако, по имеющейся информации об y1(t) нельзя определить переменную y2(t), значит, процесс можно охарактеризовать как не полностью наблюдаемый или не наблюдаемый.
Вопросы самоконтроля:
Порядок составления структурных схем ЛСУ в векторно-матричной форме.
Понятия управляемости и наблюдаемости.