

Лекция №14
Цель лекции: Изучить порядок сравнения подобранных вычислительных устройств.
Задачи лекции:
Порядок сравнения подобранных вычислительных устройств.
Критерии оценки.
Желаемый результат:
Студенты должны знать:
Порядок сравнения подобранных вычислительных устройств.
Учебный материал Критерии выбора вычислительных устройств
После подбора управляющих вычислительных устройств рассчитываются три критерия:
1) критерий технической эффективности.
В качестве этого критерия используется эффективное быстродействие машины.
![]()
Vномj – номинальное быстродействие, определяемое быстродействием элемемнтов машины.
kj – коэффициент пропорциональности:
kj=kэфj·kkj·kнпj
kэфj – коэффициент учитывающий эффективность системы команд машины, особенности структуры машины,
kkj – коэффициент учитывающий снижение быстродействия за счёт включения в систему средств, обеспечивающих требуемую надёжность,
kнпj – коэффициент учитывающий потери времени на профилактику и устранение неисправностей.
kj должно быть <1,
j – номера сравниваемых машин.
2) Критерий технико-экономической эффективности.
В основу этого критерия положен показатель, называемый критерием цены эффективности БД.
Сущность этого критерия заключается в определении показателя, который бы давал оценку стоимости выполнения одной операции.

показатель должен быть минимальным,
gi – цена эффективности БД,
L2j(t) – общая сумма затрат на постройку и эксплуатацию машины в течение времени t до момента его полного износа.
3) Критерий экономической эффективности (критерий минимальных затрат)
![]()
Wпр – приведённые затраты,
Сj – единовременные капитальные затраты, имеющие место в момент установки,
τнорм – нормальный срок окупаемости,
Wэj – эксплуатационные расходы в 1-й момент времени.
Вопросы самоконтроля:
Порядок сравнения подобранных вычислительных устройств.
Критерии оценки.
Лекция №15
Цель лекции: Изучить виды адаптивных систем, системы адаптивного регулирования.
Задачи лекции:
Системы экстремального регулирования.
Способ синхронного детектирования.
Желаемый результат:
Студенты должны знать:
Определение системы экстремального регулирования.
Математическое описание системы экстремального регулирования.
Использование способа синхронного детектирования.
Учебный материал Адаптивные системы
1. Системы экстремального регулирования
Системами экстремального регулирования называются системы, в которых задающие воздействия, то есть заданные значения регулируемых величин, определяются автоматически, в соответствии с экстремумом некоторой функции F(y1, y2, …yn). Эта функция зависит не только от регулируемых величин y1, y2, …yn, но и от неконтролируемых параметров системы и времени. Поэтому она не является постоянной и заранее известной. Однако, изменение функции F и величин y1=y1э, y2=y2э, …yn=ynэ протекает относительно медленно.
Условием экстремума дифференциальной функции нескольких переменных является равенство нулю в точке экстремума частных производных этой функции.
![]() ;
;
![]() ;
;![]() ;
…;
;
…;![]() (1)
(1)
Градиентом функции называется векторная величина:
![]() (2)
(2)
где k1, k2, k3, …,kn – единичные векторы осей, по которым отсчитываются величины y1, y2, y3, …,yn.
В точке экстремума gradF=0 (3)
Задача поиска экстремума разбивается на 2-ве:
определение градиента,
организация движения в точке экстремума.
Способ синхронного детектирования
Основан на том, что к основным медленно меняющимся величинам добавляются малые гармонические составляющие:
 (4)
(4)

Величина F поступает на асинхронные детекторы, у которых в качестве переменных величин используются те же временные составляющие.
Идеальные
синхронные детекторы умножают величину
F
на переключающую
функцию, представляющую собой прямоугольную
волну с периодом
![]() ,i=1,
2, 3, …,n
и высотой =1.
,i=1,
2, 3, …,n
и высотой =1.
Переключающая функция приблизительно может быть заменена синусоидальной частотой ωi с амплитудой, поэтому среднее значение выходных величин синхронных детекторов могут быть представлены следующим образом:
 (5)
(5)
В квазистационарном режиме, когда составляющие y10 медленно меняются поисковым движением sinω1t, величины U1, U2, U3, …Un с точностью до малых порядков пропорциональны соответствующим частным производным и, следовательно, определяют градиент в этой точке.
Разложим функцию F в окрестности этой точки в степенной ряд.
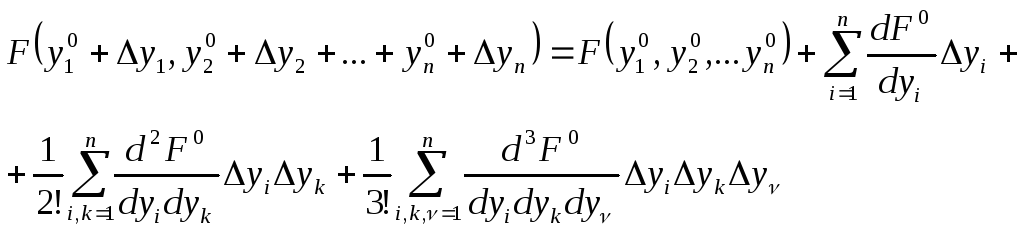 (6)
(6)
Δy1=A1sinω1t
Δyn=Ansinωnt
Величину СD можно представить:
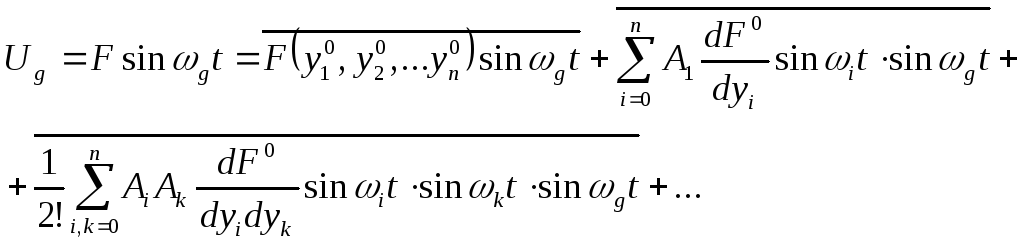 (7)
(7)
Если величины y1, y2, y3, …yn постоянны или медленно меняются так, что их изменениями за небольшой период можно пренебречь, тогда все значения sin можно приравнять к 0.
![]() (9)
(9)
где ΔUg – погрешность.
Величина погрешности по отношению к амплитудам А1, А2, …Аn имеет порядок не ниже 3-го, а по сравнению с величиной выходного сигнала – не ниже 20-го.
Выходная величина синхронного детектирования с достаточной степенью точности можно считать пропорциональной составляющим градиента y10, y20, …yn0.
Вопросы самоконтроля:
Дайте определение системы экстремального регулирования.
Математическое описание системы экстремального регулирования.
Использование способа синхронного детектирования.