

Лекция №16
Цель лекции: Изучить способы поиска градиента адаптивных систем.
Задачи лекции:
Способ производной по времени.
Способ запоминания экстремума.
Способ Гаусса-Зайделя.
Способ градиента.
Способ наискорейшего спуска.
Желаемый результат:
Студенты должны знать:
Способ производной по времени.
Способ запоминания экстремума.
Способ Гаусса-Зайделя.
Способ градиента.
Способ наискорейшего спуска.
Учебный материал
Способ производной по времени
Производная по функции времени определяется выражением:
![]() (1)
(1)
Из
выражения (1) следует, что, задавая
поочерёдно скорости изменения y1,
y2,
…yn
и производную по времени
![]() ,
можно найти составляющие градиенты.
,
можно найти составляющие градиенты.
Недостатком этого метода является необходимость дифференцирования функции F по времени, что сопровождается поднятием уровня высокочастотных помех.
Способ запоминания экстремума
Этот способ заключается в том, что система совершает вынужденное или автоколебательное движение в зоне экстремума.
При достижении экстремального значения F=Fэ, оно фиксируется на запоминающем устройстве. Градиент функции определяется по разности текущего и экстремального значения.
Способ Гаусса-Зайделя
Способ заключается в поочерёдном изменении координат y1, y2, …yn. Сначала фиксируются координаты с y2 до yn, а координата y1 изменяется так, чтобы соответствующая градиента стала =0:
![]()
Затем фиксируются все координаты от y3 до yn :
![]()
и так далее
до
![]()
После этого возвращаются к началу и повторяют весь цикл снова.
Этот процесс продолжается до тех пор, пока не будет получена точка экстремума.
Способ градиента
В этом способе осуществляется одновременное изменение всех координат так, чтобы обеспечить движение системы в направлении близком к мгновенному направлению вектора градиента.
В простейшем случае непрерывного безынерционного управления должны быть реализованы следующие зависимости:
 (2)
(2)
Здесь k – коэффициент пропорциональности.
Для получения правильного направления движения для случая экстремума максимума – k>0, экстремума минимума – k<0.
Уравнение (2) соответствует устойчивому движению экстремальной системы, при котором производная от F сохраняет свой знак всюду, кроме точки экстремума.
При шаговом движении:
 (3)
(3)
![]() ,
,
![]() ,
…
,
…![]() – фиксированные шаги в направлении
экстремумам.
– фиксированные шаги в направлении
экстремумам.
Способ наискорейшего спуска
При способе наискорейшего спуска движение происходит по начальному направлению вектора градиента до тех пор, пока производная функция F по этому направлению не обратится в нуль. Затем опять определяется направление градиента и происходит движение вдоль этого вектора до обращения в нуль производной от F по этому направлению. Процесс повторяется до достижения точки экстремума.
Рассмотрим схему экстремального регулирования настройки колебательного контура.
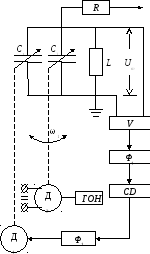
Общая ёмкость колебательного контура:
с=с1+с2+с20+Аsinω1t (4)
Здесь с20 – постоянная составляющая ёмкости конденсатора с2,
ω1 – угловая частота вращения ротора.
ω1 выбирается так, чтобы она была во много раз меньше частоты полезного сигнала ω=2πf и больше возможной частоты процесса регулирования.
Двигатель Д2 синхронно с вращением конденсатора ротора с2 даёт опорную величину и в виде опорного напряжения той же частоты от генератора ГОН.
Переменное
напряжение на колебательном контуре
после выпрямления и сглаживания фильтром
F1
поступает
на вход синхронного детектора.
На выходе
синхронного детектора формируется
сигнал, пропорциональный производной
от амплитуды напряжения контура по
ёмкости
![]() .
.
Этот
сигнал после сглаживания фильтром F2
поступает далее на усилитель и двигатель
Д1.
последний будет изменять регулируемую
величину и производить подстройку до
тех пор, пока производная
![]() не станет =0.
не станет =0.
Всякое изменение частоты сигнала будет вызывать автоматическую подстройку на максимум напряжения на контуре.
В
рассматриваемой экстремальной системе
получается своеобразная следящая
система, ошибкой которой является
производная
![]() ,
поэтому эта схема может быть приведена
к соответствующей структурной схеме:
,
поэтому эта схема может быть приведена
к соответствующей структурной схеме:

Входной
величиной является значение ёмкости,
соответствующее экстремуму. Оно связано
соотношением
![]() ,
гдеL
– индуктивность.
,
гдеL
– индуктивность.
Результирующая передаточная функция разомкнутой системы имеет вид:
![]()
Исследование динамики исследуемой системы сводится к исследованию следящей системы. Поэтому здесь применимы все методы, используемые в непрерывных автоматических системах.
Помимо обычных показателей качества для экстремальных систем используется ещё одна характеристика – потери на поиск. В установившемся режиме регулируемая величина колеблется около значения, соответствующего экстремуму функции. В следствии этого, среднее значение отличается от экстремального. Среднее значение, обусловленное колебаниями поиска в установившемся режиме работы системы, называется потерями на поиск и представляется в виде степенного ряда:
![]() (5)
(5)
В степенном ряду частная производная соответствует точке экстремума, а Δу – это отклонение от этой точки. Если использовать квадратичную форму, то потери на поиск можно представить в виде:
![]()
Здесь
![]() – средний квадрат отклонения регулируемой
величины соответствующего экстремума.
– средний квадрат отклонения регулируемой
величины соответствующего экстремума.
Если известна амплитуда поиска А1, то:
![]()
И в общем случае:
![]() (1)
(1)
Рассмотрим исследование динамики экстремальной системы при F=F(y1, y2, …yn) для случая поиска экстремума по способу градиента.
Структурная схема исследования динамики экстремальной системы
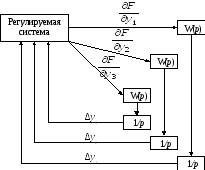
Эта схема имеет:
![]()
или
![]()
W(p) – одинаковая для всех каналов.
Для малых отклонений для точки экстремума:
![]() (2)
(2)
![]() (3)
(3)
В n-мерном пространстве:
![]() (4)
(4)
Т.е. область экстремума минимума является эллипсоидом.
Если
![]() (5)
(5)
(5) – эллипсоид экстремума максимума.
![]() (6)
(6)
(6) – уравнение для малых отклонений.
Сi – полуоси определяющего эллипсоида.
"+" – минимум
"-" – максимум
![]() (7)
(7)
(7) – характеристическое уравнение для каждого из каналов.
Таким образом, исследование динамики сводится к анализу n-изолированных каналов, которым соответствуют характеристические уравнения (7).
Вопросы самоконтроля:
Способ производной по времени.
Способ запоминания экстремума.
Способ Гаусса-Зайделя.
Способ градиента.
Способ наискорейшего спуска.