

Учебный материал Математические модели оу
Наиболее часто для математического описания используются дифференциальные, интегрально-дифференциальные и разностные уравнения, записанные по координатам или в векторно-матричной форме.
Динамические элементы относятся к непрерывным, если рассматриваемые процессы и сигналы изменяются непрерывно.
В дискретных элементах процессы и сигналы имеют конечное число значений по величине и времени.
Математические описания элементов удобно выполнять через переменные состояния. Они аналогичны обобщённым координатам, а пространство их изменений является фазовым.
у(t) – переменное состояние;
x(t) – входящие сигналы;
u(t) – выходящие сигналы.
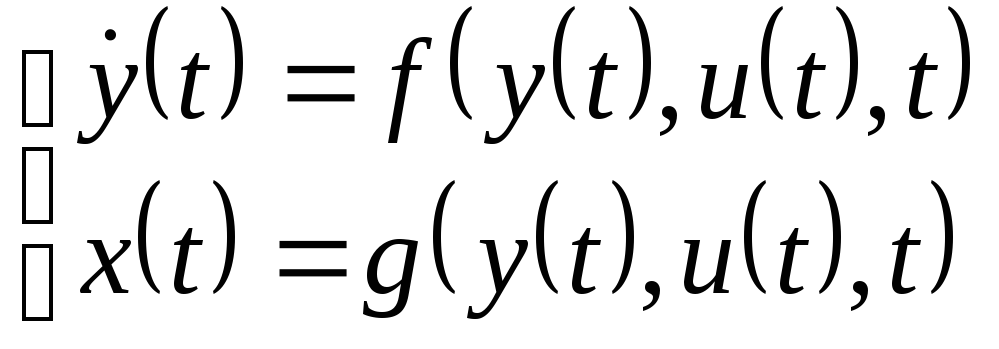 (1)
(1)
(1) позволяет описать
(1) справедлива в заданном интервале времени (t0, t) и при заданных начальных и граничных условиях у(t), x(t), u(t).
Уравнение устройства для замера угловых скоростей выходного вала двигателя внутреннего сгорания
![]() (2)
(2)
Описывает всё устройство на неопределённом промежутке времени.
m – масса устройства;
l – перемещение этой массы;
kν – коэффициент скоростного трения;
kc – коэффициент жёсткости пружины;
ω – угловая скорость (частота вращения).
Введём:
![]()
![]() ,
,
тогда получим:
 (3)
(3)
описывает состояние устройства.
Можно рассчитывать состояние устройства в любой заданной промежуток времени.
Уравнение ракеты, вертикально стартующей под действием силы тяги
(4)
![]()
Уравнение ракеты:
![]() ,
,
![]()
 .
.
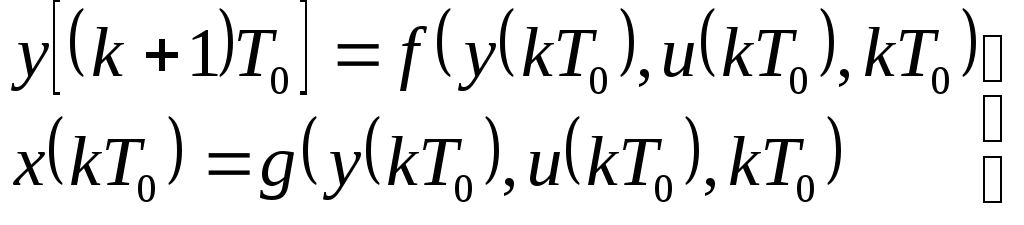
Разностное уравнение для описания элементов дискретного действия
 (1)
(1)


Описывает состояние дискретного элемента. Здесь не учитывается такт квантования, поэтому для решения эти уравнения очень сложные.
Такт квантования системы – это та частота, с которой опрашиваются датчики.
Теперь эта же система с тактом квантования:
 (2)
(2)
Для написания программы системы управления используют три метода:
Эйлера.
![]() .
.
Адамс-Балифорт.
![]() .
.
Адамс-Мультон.
![]() .
.
U – сигнал (выходной, входной или сравниваемый);
To – такт квантования;
Tk-1,k-2 – предыдущие сигналы;
Tk – настоящий сигнал;
Tk+1 – следующий сигнал.
Вопросы самоконтроля:
Как описываются переменные состояния ЛСУ?
Как описываются переменные состояния дискретных объектов ЛСУ?
Метод Эйлера.
Метод Адамса-Башфорта.
Метод Адамса-мультона.
Лекция №3
Цель лекции: Изучить математические методы линеаризации нелинейных уравнений объектов управления.
Задачи лекции:
Четыре метода линеаризации нелинейных уравнений объектов управления.
Описание стационарных объектов управления ЛСУ.
Желаемый результат:
Студенты должны знать:
Перечислите методы линеаризации нелинейных уравнений объектов управления;
Как линеаризуются графики нелинейных функций в рабочей области;
Как проводится линеаризация методом наименьших квадратов.
Учебный материал Методы линеаризации уравнений
Четыре метода линеаризации.
Нелинейная функция в рабочей области раскладывается в ряд Тейлора.
Заданные в виде графиков нелинейные функции линеаризуются в рабочей области прямыми.
Вместо непосредственного определения частных производных вводятся переменные в исходные уравнения.
 (3)
(3)
Проводит линеаризации нелинейных характеристик по методу наименьших квадратов или методом трапеции.
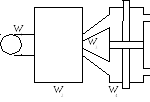
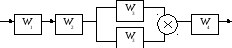
Сначала составить структурную схему и объединить передаточные функции.
Написать, как это упростить до W1234.
При проектировании непрерывных, дискретно-непрерывных и дискретных систем необходимо знать математические модели объектов управления.
Система дискретных уравнений, передаточные функции, частотные характеристики и импульсные переходные функции удобны лишь при невысоких порядках математических моделей.
При высоких порядках моделей используют векторно-матричный аппарат записи уравнений.
Стационарный объект описывается уравнением:
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
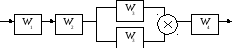
В соответствии с этим уравнением существует типовая структурная схема многомерного объекта.
 –потому
что много состояний.
–потому
что много состояний.
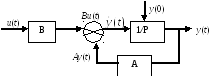
Нестационарный объект:
![]()
(схему нарисовать см)
Решение:
1.
2.
![]()
![]()

Вопросы самоконтроля:
Рассмотрите линеаризацию нелинейных функций методом наименьших квадратов?
Рассмотрите линеаризацию графиков нелинейных функций в рабочей области?
Рассмотрите линеаризацию нелинейных функций разложением в ряд Тейлора.