

Лекция №4
Цель лекции: Изучить математические модели нелинейных объектов ЛСУ, линеаризация нелинейных элементов ЛСУ с помощью коэффициентов линеаризации.
Задачи лекции:
Математические модели нелинейных объектов ЛСУ.
Коэффициенты линеаризации.
Желаемый результат:
Студенты должны знать:
Существующие виды нелинейных объектов управления ЛСУ;
Математическое описание коэффициентов линеаризации нелинейных объектов ЛСУ.
Учебный материал Математические модели нелинейных объектов.
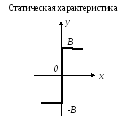
Весь класс существенных нелинейностей делится на 2-ве группы. К первой группе относятся однозначные нелинейности, у которых связь между входным и выходным векторными сигналами зависит только от формы статической характеристики.
y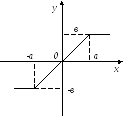 =F(x)
=F(x)
x(t)=x1(t)
y1(t)=a(x1)x1(t) (1)
Из (1) получаем приближённое значение передаточной функции:
![]() (2)
(2)
Ко второй группе относятся двузначные нелинейности, у которых связь между входным и выходным сигналами зависит не только от формы статической характеристики, но и от предыстории входного сигнала.
Для учёта предыстории влияния входного сигнала, учитывается не только входной сигнал, но и скорость его изменения.
y(t)=F[x(t)] (3)
x(t)=x1(t)
![]() (4)
(4)
a(x1), b(x1) – коэффициенты гармонической минерализации двузначных нелинейностей; Т – период колебаний в 1-й гармонике.
Эквивалентная передаточная функция:
y(x1)=a(x1)+jb(x1) (5)
То есть, в общем, виде можно записать:
![]()
![]() (6)
(6)
k – номер гармоники.
![]() (7)
(7)
Матрицы
![]() и
и![]() являются периодическими с периодомТ.
являются периодическими с периодомТ.
В случае однозначной нелинейности, матрицу коэффициентов линеаризации выбирают таким образом, чтобы минимизировать среднее значение квадрата разности между точным и приближённым сигналами на выходе.
![]() (8)
(8)
![]() –значение
по 1-й гармонике
–значение
по 1-й гармонике
E(t)=Y(x1)-a(x1)x1 (9)
в случае однозначной нелинейности
Пусть на вход нелинейности поступает первая гармоника синусоидального сигнала:
![]() (10)
(10)
![]() (11)
(11)
F – приближенное значение передаточной функции по 1-ой гармонике.
В случае двузначной нелинейности:
![]() (12)
(12)
Е – разность между истинным и приближенным значениями сигналов.
 (13)
(13)


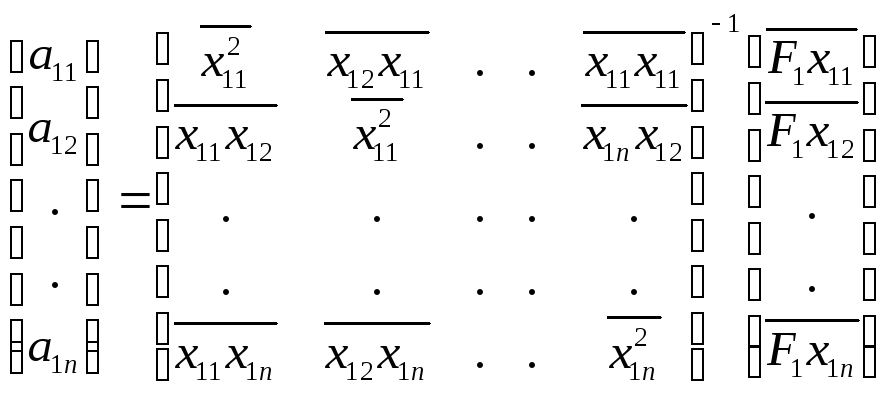
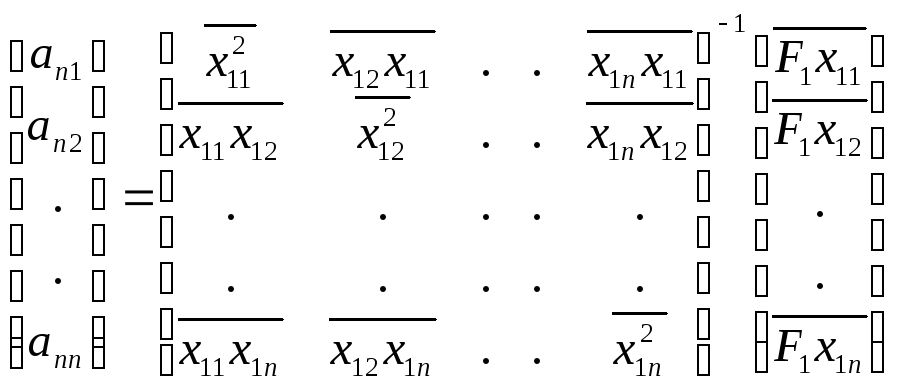
Определим коэффициенты линеаризации двузначной нелинейности, когда на её вход поступает первая гармоника синусоидального сигнала, и имеется один выход. Из матрицы получаем коэффициенты гармонической линеаризации.
 (1)
(1)
 (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
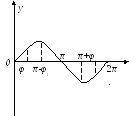
Классическая теория гармонической линеаризации типичных нелинейностей предполагает, что сигнал, снимаемый с выхода нелинейностей, является периодическим и имеет основную частоту, совпадающую с частотой синусов входного сигнала. В результате такого допущения, при нахождении эквивалентных передаточных функций или коэффициентов гармонической линеаризации, учитывают только первую гармонику, а влиянием высших гармоник - пренебрегают. Это справедливо лишь для таких систем, линейная часть которых является низкочастотной и подавляет колебания высоких частот.
Пусть на вход однозначной нелинейности поступает сигнал:
![]() (7)
(7)
На
выходе:
![]() (8)
(8)
И приближённое значение выходного сигнала:
![]() (9)
(9)
А1 – первая гармоника сигнала на выходе нелинейности.
Приближённое значение выходного сигнала через коэффициенты гармонической линеаризации:
![]() (10)
(10)
![]() (11)
(11)
![]() (12)
(12)
или
![]()
Или коэффициенты усиления.
При двузначной нелинейности:
![]() (13)
(13)
![]() (14)
(14)
![]()
![]() ,
,
![]()
![]() (15)
(15)
а(А), b(А) – коэффициенты гармонической линеаризации по 1-ой гармонике.
![]() (16)
(16)
![]() или
или
![]() (17)
(17)
j, μ(A) – амплитудная и фазовая характеристики по 1-ой гармонике.
![]() (18)
(18)
![]() (19)
(19)
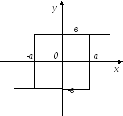
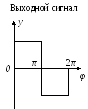
Пример:
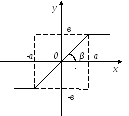
А>>С
k – тангенс угла наклона
k=tgβ
![]()
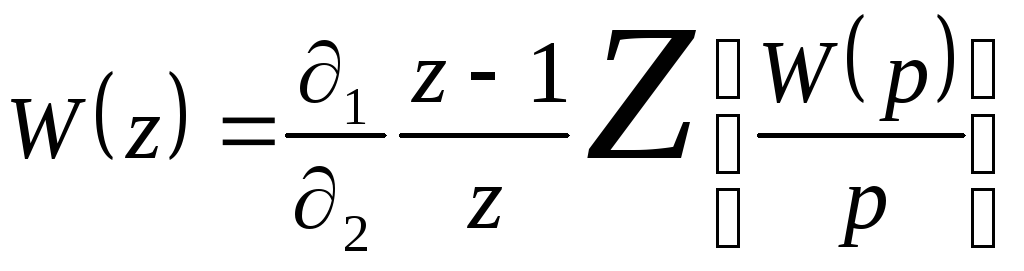
Для МП W=1
Далее от W(p)=>W(z)
y1(t)=F(x0,A)+Aa(x0,A)·sinωt+Ab(x0,A)cosωt
F(x0,A), Ab(x0,A), Aa(x0,A) – варианты этих величин, в зависимости от их смещения, представлены в справочниках.
В случае использования в системе нелинейных элементов, имеющих статические характеристики со смещением, необходимо учитывать при линеаризации дополнительные гармонические составляющие автоколебаний. При этом эквивалентная передаточная функция зависит от двухчастотного или многочастотного сигнала. Использование таких эквивалентных передаточных функций в нелинейных системах целесообразно, когда требуется оценить влияние высших гармоник на появление автоколебаний.
Вопросы самоконтроля:
Перечислите виды существующих нелинейных объектов управления ЛСУ?
Рассмотрите математическое описание коэффициентов линеаризации нелинейных объектов ЛСУ?
Рассмотрите математическое описание коэффициентов линеаризации двузначных нелинейных объектов ЛСУ?