

Лекция №12
Цель лекции: Изучить порядок реализации корректирующих устройств в дискретных локальных системах управления.
Задачи лекции:
Порядок реализации корректирующих устройств в дискретных локальных системах управления.
Виды программирования корректирующих устройств локальных систем управления.
Желаемый результат:
Студенты должны знать:
Порядок реализации корректирующих устройств в дискретных локальных системах управления.
Виды программирования корректирующих устройств локальных систем управления.
Учебный материал Дискретно-непрерывные линейные и нелинейные системы.
Структурная схема исходной локальной системы разработана или полностью задана; в процессе проектирования найти законы регулирования, которые можно реализовать в виде последовательных, параллельных или последовательно-параллельных КУ в виде RC-цепочки или программы коррекции.
При проектировании дискретно-аналоговых систем необходимо подбирать параметры не только микропроцессора, но и преобразователей аналог-код, код-аналог.
Значительное влияние на запасы устойчивости, показатели качества и характеристики точности оказывают такт квантования и длина слова. В случае несоответствия показателей качества и точности проводится коррекция системы с помощью RC- цепочки или программы коррекции.
Используются 4-ре способа программирования:
1) прямое,
2) последовательное,
3) параллельное,
4) последовательно-параллельное.
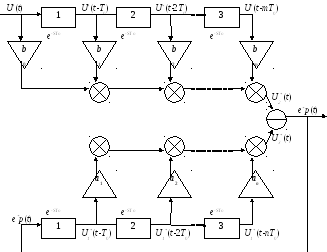
Рассмотрим прямое программирование:
 (1)
(1)
При прямом программировании по передаточной функции (1) определяем разностное уравнение
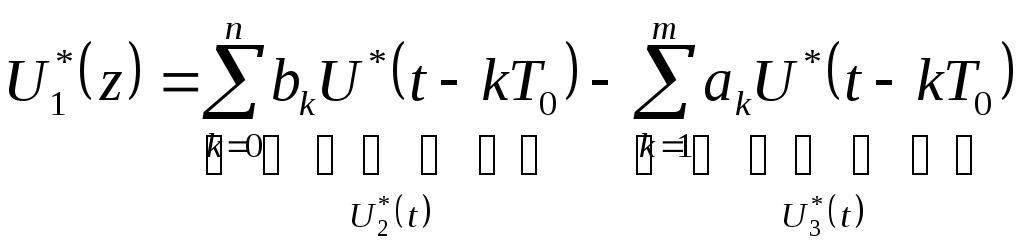 (2)
(2)
уравнение (2) делится на две части:
lp*(t)=U2*(t)-U3*.
Строится структурная схема программирования:
Последовательное программирование.
При последовательном программировании передаточную функцию преобразуют к виду:
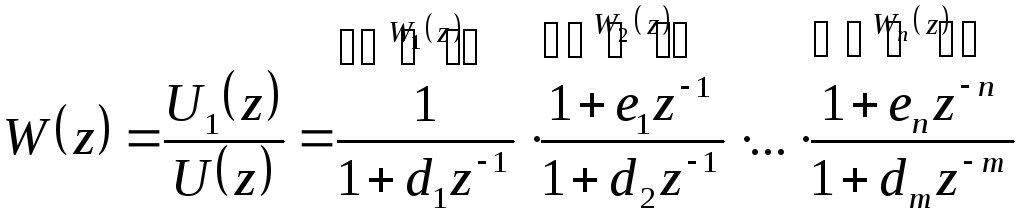
1/en и 1/dm – соответственно нули и полюса характеристического уравнения.
![]()
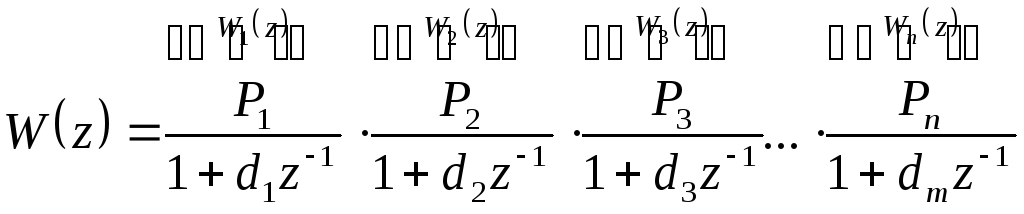
При параллельном программировании:
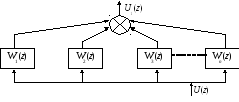
Если есть Wky(jλ)=, то можем составить программу коррекции.
1) Производим обратно билинейное преобразование:
![]()
2) Делаем сдвиг на (z-1)
![]() ,
,
т.е. домножаем на (z-1).
![]()
Запишем разностное уравнение в масштабе реального времени, вместо z2→Uk-2, z→Uk-1.
Сначала запишем знаменатель с противоположным знаком, затем числитель
![]()
Это уравнение и программируется.
Вопросы самоконтроля:
Перечислите порядок реализации корректирующих устройств в дискретных локальных системах управления.
Назовите виды программирования корректирующих устройств локальных систем управления.
Лекция №13
Цель лекции: Изучить порядок расчета передаточной функции двигателя.
Задачи лекции:
Порядок расчета передаточной функции двигателя.
Желаемый результат:
Студенты должны знать:
Порядок расчета передаточной функции двигателя.
Учебный материал Расчёт пф двигателя.
![]()
|
Электрический |
|
km – моментальная постоянная электродвигателя Ra – сумма сопротивлений обмоток якоря электродвигателя, соединительных проводов и выходной цепи электромагнитного усилителя kν – коэффициент вязкого трения ke – постоянная противо-эдс Jn – приведённый к валу двигателя момент инерции вращающихся частей и исполнительного механизма Tg=La/Ra – электромагнитная постоянная якоря Ra – омическое сопротивление La – индуктивное сопротивление |
|
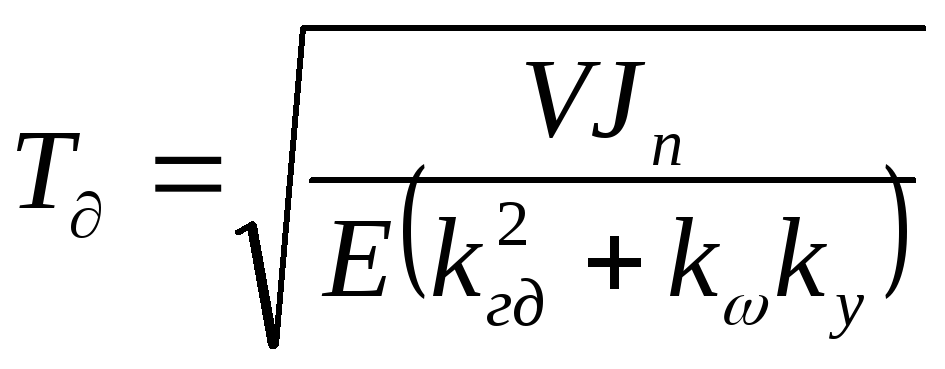
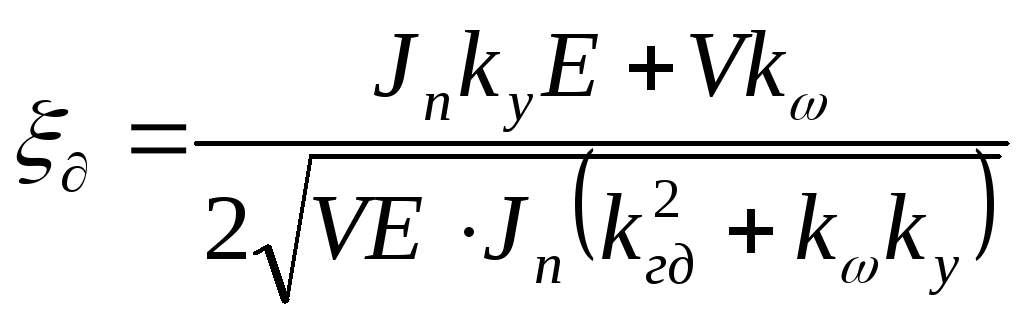
Гидравлический |
|
kn – постоянная гидравлической помпы kгд – постоянная гидродвигателя kω – коэффициент жидкостного трения ky – коэффициент, характеризующий утечки гидравлического привода V –объём рабочей жидкости в цилиндре при нормальном давлении E – модуль объёмной упругости Jn – приводимый к валу двигателя момент инерции всех вращающихся частей |
|
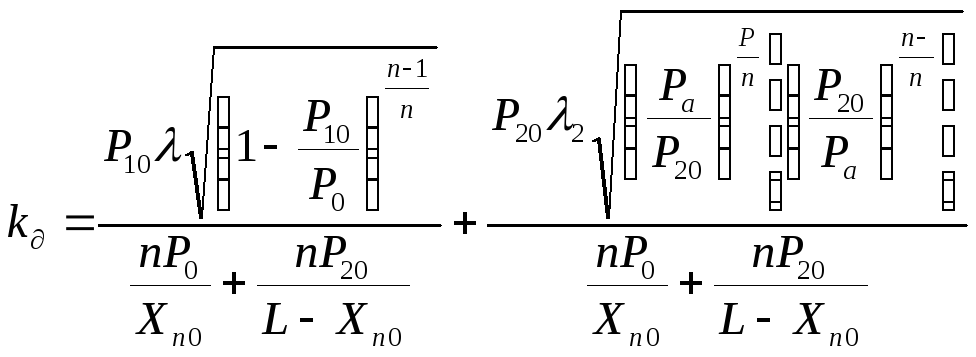
Пневматический двигатель |
|
P10 – установившееся давление в 1-ой и 2-ой полостях силового цилиндра P0 – давление воздуха в резервуаре Pa – атмосферное давление окружающей среды Xn0 – величина перемещения поршня L – длина силового цилиндра за вычетом толщины поршня n – показатель политропы λ1, λ2 – постоянные привода Fn – площадь поршня m – масса поршня, штока и подвижных частей исполнительного механизма kν – постоянная скоростного трения |
Передаточное соотношение редуктора:
![]() ;
;
Jn – момент инерции на валу двигателя,
Jg – момент инерции объекта управления.
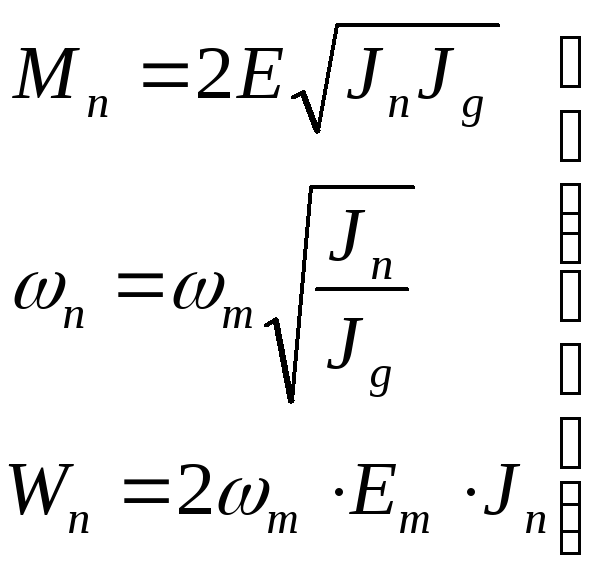
Привод будет согласован с нагрузкой при следующих номинальных параметрах.
 рассчитать
после подбора двигателя и редуктора
рассчитать
после подбора двигателя и редуктора
Wn – мощность
Em и ωm – максимальная угловая скорость и максимальное ускорение углового вала.
Вопросы самоконтроля:
Порядок расчета передаточной функции двигателя.
Порядок расчета передаточной функции привода.