

Вопросы и задания
1. Дайте характеристики специфики и особенностей отладки схем микропроцессорных и микроконтроллерных систем.
2. В каких операциях отладки аппаратной части и как могут использоваться контрольно-измерительные приборы?
3. В каких операциях отладки аппаратной части и как могут использоваться логические пробники и логические компараторы?
4. В каких операциях отладки аппаратной части и как могут использоваться бесконтактные индикаторы тока?
5. В каких операциях отладки аппаратной части и как могут использоваться анализаторы логических состояний?
6. В каких операциях отладки аппаратной части и как могут использоваться анализаторы временных диаграмм?
7. В каких операциях отладки аппаратной части и как могут использоваться
8. В каких операциях отладки аппаратной части и как могут использоваться сигнатурные анализаторы?
3.2. Отладка программного обеспечения мпсу
Отладка программного обеспечения МПСУ включает контроль работоспособности и локализацию отказов программы. Основными методами отладки являются анализ текста программы и тестирование исполняемой программы.
Суть статического анализа состоит в проверке синтаксиса команд, форматов данных и проверке полноты и непротиворечивости графа задач МПСУ (рис.3.5).
Граф является обобщенным представлением алгоритма, на котором вершины сопоставляются с начальными и конечными точками команд безусловных и условных переходов по программе, а ветви эквивалентны линейным участкам программы. Такое представление имеет то преимущество, что граф, отображая процессы преобразования информации, намного проще реального алгоритма и, тем более, программы.
Если полный граф задач МПСУ содержит все же большое число вершин и ветвей, то целесообразно на нем выделить подграфы. Подграфы, как правило, выделяются по функциональному признаку так, чтобы входящие в подграф вершины и ветви относились бы к одной законченной задаче, например, управления одним объектом. В таком случае количество ветвей между подграфами минимально, что упрощает анализ подграфа, а небольшие размеры подграфов позволяют проследить на них все возможные пути движения информации, тем самым установить полноту и непротиворечивость выполнения команд программ.
Т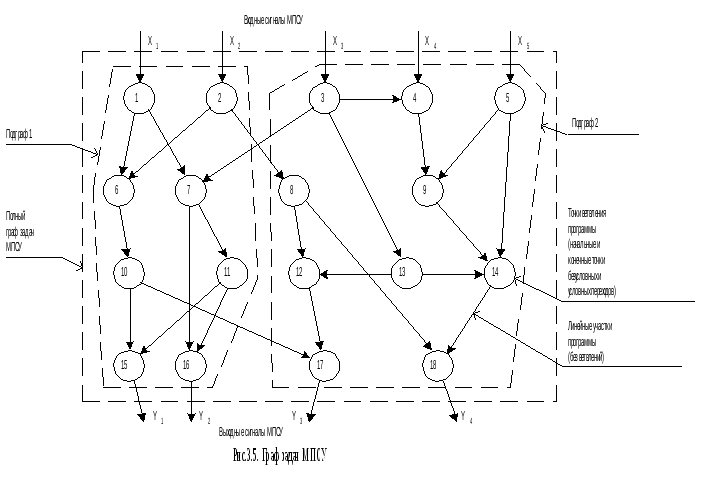 естирование
исполняемой программы производится с
реальными и пробными сигналами. Основными
методами выявления отказов являются
периодические выполнения специально
составленной тестовой программы,
непрерывный контроль зависаний и
зацикливаний программы. Локализация
отказов в программе осуществляется
переводом МПСУ в пошаговое выполнение
команд. Во всех названных вариантах
тестирования в схему МПСУ вводятся
дополнительные элементы и составляются
специальные программы.
естирование
исполняемой программы производится с
реальными и пробными сигналами. Основными
методами выявления отказов являются
периодические выполнения специально
составленной тестовой программы,
непрерывный контроль зависаний и
зацикливаний программы. Локализация
отказов в программе осуществляется
переводом МПСУ в пошаговое выполнение
команд. Во всех названных вариантах
тестирования в схему МПСУ вводятся
дополнительные элементы и составляются
специальные программы.
Т естовыми
программами проводится проверка
работоспособности элементов схемы и
основной программы МПСУ. При тестировании
могут генерироваться пробные сигналы.
На время тестирования запоминается и
не изменяется состояние сигналов
исходной программы. Результатами
тестирования является информация об
отказавшей программе, неисправном
элементе схемы. В случае обнаружения
отказа далее проводится пошаговое
выполнение команд программы МПСУ.
естовыми
программами проводится проверка
работоспособности элементов схемы и
основной программы МПСУ. При тестировании
могут генерироваться пробные сигналы.
На время тестирования запоминается и
не изменяется состояние сигналов
исходной программы. Результатами
тестирования является информация об
отказавшей программе, неисправном
элементе схемы. В случае обнаружения
отказа далее проводится пошаговое
выполнение команд программы МПСУ.
На рис.3.6 приведена принципиальная электрическая схема пошагового контроля выполнения команд, а на рис.3.7 - алгоритм пошагового режима.
При разомкнутом тумблере SA2 (положение "Работа") выполняется основная программа МПСУ. В положении "Тест" реализуется пошаговый режим выполнения основной программы МПСУ: на каждом шаге выполняется только одна команда и по результатам ее выполнения выводится диагностическая информация. Содержание диагностической информации должно быть таким, чтобы с ее помощью можно было бы обнаружить неисправности в работе МПСУ. Примеры диагностической информации:
- вывод на дисплей адреса команды, выполненной на последнем шаге;
- вывод кода и мнемокода выполненной команды;
- вывод содержимого регистров и заданных ячеек памяти;
- вывод значений входных и выходных сигналов внешних устройств.
Схема подготавливается к пошаговому режиму переводом тумблера SA2 в положение "Тест". Вход в пошаговый режим и дальнейшее продвижение по программе шагами осуществляется кнопкой SA1 "Шаг", которую нужно каждый раз сначала нажать, а затем отпустить. В результате такой манипуляции кнопкой "Шаг" в стеке будет сохранен адрес отложенной команды и программа зациклится на блоках 2 и 3 (рис.3.7), выполнив перед этим в блоке 1 программу вывода диагностической информации по результатам выполнения очередной команды.
При нажатой кнопке "Шаг" на вход IR1 контроллера прерываний PIC поступит сигнал 1, процессор приступит к обслуживанию запроса прерывания IR1 и управление будет передано на стартовый адрес блока 1. Программа блока 1 состоит из трех функциональных частей:
- извлечение из выделенного спаренного
регистра общего назначения микропроцессора
или выделенных ячеек ОЗУ адреса
выполненной команды;
извлечение из выделенного спаренного
регистра общего назначения микропроцессора
или выделенных ячеек ОЗУ адреса
выполненной команды;
- вывод на дисплей диагностической информации, представляющей адрес и коды выполненной команды и значения сигналов в выбранных точках схемы МПСУ и внешних устройств;
- пересылка из стека адреса отложенной команды в выделенный спаренный регистр общего назначения или выделенные ячейки ОЗУ.
В блоке 2 опрашивается снимаемый с тумблера SA2 сигнал режима работы схемы, поступающий на вход РА7 контроллера PPI. Если SA2 переводится в положение "Работа", то следует безвозвратный выход в основную программу через блок 6. При положении "Тест" тумблера выполняются команды блока 3.
Сигнал РА6, проверяемый в блоке 3, удерживается в состоянии 1 до тех пор, пока кнопка SA1 "Шаг" остается нажатой. Поэтому при нажатой кнопке "Шаг" программа зацикливается на блоках 2 и 3.
После отпускания кнопки "Шаг" программа пошагового режима зацикливается на блоках 4 и 5. Диагностическая информация, сформированная в блоке 1, удерживается постоянно выведенной на дисплей и анализируется обслуживающим персоналом.
Для продвижения на шаг по тестируемой программе нажимается кнопка "Шаг". Следует выход через блок 6 на отложенную команду. Команда выполняется и во время ее выполнения проверяется вход IR1 контроллера PIC. При нажатой кнопке "Шаг" будет IR1=1 и вновь запустится блок 1 программы обработки прерывания с предварительным сохранением в стеке адреса отложенной команды.
С хема
непрерывного контроля зависаний
программы приведена на рис.3.8.
хема
непрерывного контроля зависаний
программы приведена на рис.3.8.
При
нормально выполняемой программе МПСУ
происходят периодические обращения к
внешним устройствам – ВУ1, ВУ2,… сигналом
![]() =0.
Во время этих обращений периодически
сбрасывается счетчик СТ. Если в обращениях
к ВУ наступил длительный перерыв, то
счетчик под действием тактовых импульсов
ТИ успеет заполниться до конца и на
выходе Q
переполнения счетчика появится сигнал,
по которому произойдет сброс процессора
или микроконтроллера, а также будет
выведена сигнализация о зависании
программы МПСУ.
=0.
Во время этих обращений периодически
сбрасывается счетчик СТ. Если в обращениях
к ВУ наступил длительный перерыв, то
счетчик под действием тактовых импульсов
ТИ успеет заполниться до конца и на
выходе Q
переполнения счетчика появится сигнал,
по которому произойдет сброс процессора
или микроконтроллера, а также будет
выведена сигнализация о зависании
программы МПСУ.
С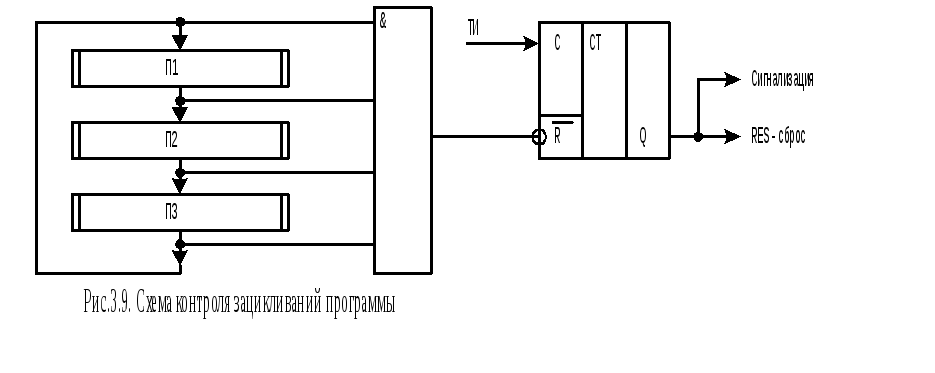 хема
непрерывного контроля зацикливаний
программы приведена на рис.3.9. При
нормально выполняемой программе МПСУ,
состоящей из последовательно выполняемых
подпрограмм П1, П2 и т.д., в начале каждой
подпрограммы посылается 0-импульс сброса
на счетчик СТ. Если произошла недопустимо
большая задержка в выполнении хотя бы
одной подпрограммы, то счетчик под
действием тактовых импульсов ТИ успеет
заполниться до конца и на выходе Q
переполнения счетчика появится сигнал,
по которому произойдет сброс процессора
или микроконтроллера, а также будет
выведена сигнализация о зацикливании
программы МПСУ.
хема
непрерывного контроля зацикливаний
программы приведена на рис.3.9. При
нормально выполняемой программе МПСУ,
состоящей из последовательно выполняемых
подпрограмм П1, П2 и т.д., в начале каждой
подпрограммы посылается 0-импульс сброса
на счетчик СТ. Если произошла недопустимо
большая задержка в выполнении хотя бы
одной подпрограммы, то счетчик под
действием тактовых импульсов ТИ успеет
заполниться до конца и на выходе Q
переполнения счетчика появится сигнал,
по которому произойдет сброс процессора
или микроконтроллера, а также будет
выведена сигнализация о зацикливании
программы МПСУ.