

3.8 Розрахунок кута струмообмеження
Струм
якоря визначається величиною керуючого
сигналу, який поступає на регулятор
струму. При
![]() неузгодження на вході регулятора струму
додатне
неузгодження на вході регулятора струму
додатне![]() ,
регулятор струму збільшує свій вихідний
сигнал, відповідно збільшується напруга
тиристорного перетворювача і зростає
струм
,
регулятор струму збільшує свій вихідний
сигнал, відповідно збільшується напруга
тиристорного перетворювача і зростає
струм![]() (і оберти двигуна). І навпаки при
(і оберти двигуна). І навпаки при![]() напруга тиристорного перетворювача
зменшується, відповідно зменшується і
струм
напруга тиристорного перетворювача
зменшується, відповідно зменшується і
струм![]() (оберти
двигуна в цьому випадку зменшуються).
(оберти
двигуна в цьому випадку зменшуються).
Отже для обмеження струму по максимальній величині (відповідно і обмеження обертового моменту двигуна) повинна виконуватись наступна умова:
![]() при
при
![]() .
.
В нашому
випадку
![]() .
Відповідно характеристика нелінійного
вузла струмообмеження буде наступна
(рис.3.8.1).
.
Відповідно характеристика нелінійного
вузла струмообмеження буде наступна
(рис.3.8.1).
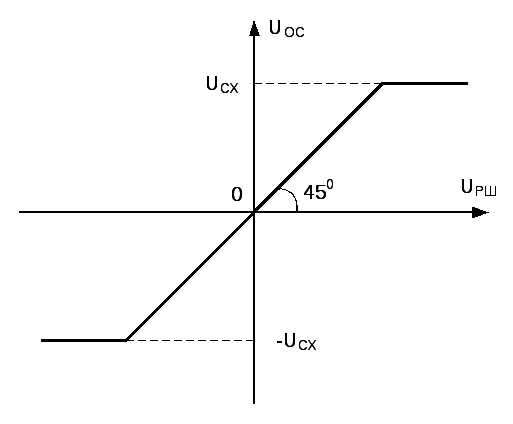
Рисунок 3.8.1 – Характеристика вузла струмообмеження.
Даний
нелінійний вузол струмообмеження
пропускає вхідний сигнал
![]() один до одного, а при
один до одного, а при![]() обмежується значенням
обмежується значенням![]() .
.
Якщо
при більшому навантаженні або при пуску
ДПС струм
![]() хоча б ненабагато перевищить значення
хоча б ненабагато перевищить значення![]() ,
то при цьому
,
то при цьому![]() стане більшим
стане більшим![]() ,
на вході регулятора струму буде від'ємний
сигнал, тиристорний перетворювач буде
знижувати значення
,
на вході регулятора струму буде від'ємний
сигнал, тиристорний перетворювач буде
знижувати значення![]() і струм
і струм![]() буде зменшуватись до значення
буде зменшуватись до значення![]() .
При рівності
.
При рівності![]() вхід регулятора струму буде рівний 0, а
його вихід не зміниться.
вхід регулятора струму буде рівний 0, а
його вихід не зміниться.
Якщо
вал двигуна заклинить, то в ідеальному
випадку спрацювання струмообмеження,
двигун зупиниться без механічної
поломки. При цьому в якірному колі буде
прикладено найбільшу напругу і в
заторможеного двигуна по якірному колу
буде протікати струм
![]() ,
рівний
,
рівний![]() .
Це цілком вірогідно, так як внутрішній
контур настроєний на МО і кращим чином
відпрацьовує керуючий сигнал
.
Це цілком вірогідно, так як внутрішній
контур настроєний на МО і кращим чином
відпрацьовує керуючий сигнал![]() ,
що надходить на внутрішній контур
струму.
,
що надходить на внутрішній контур
струму.
4. Моделювання сар в Matlab. Графики перехідних процесів
4.1 Моделювання САР в Matlab до розділу 3.4
Введемо розрахованиі регулятори у внутрішній контур САУ та промоделюємо систему в Matlab (рис. 4.1.1).
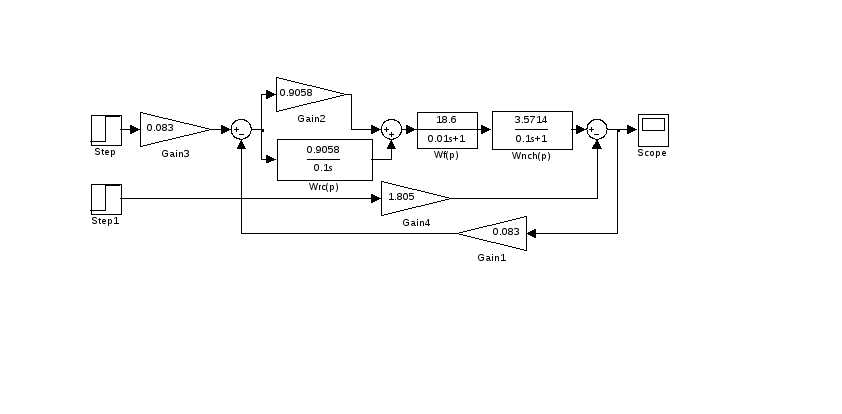
Рисунок 4.1.1 – Модель внутрішнього контуру САР, настроєного на МО
Графік періхідного процесу має вигляд:
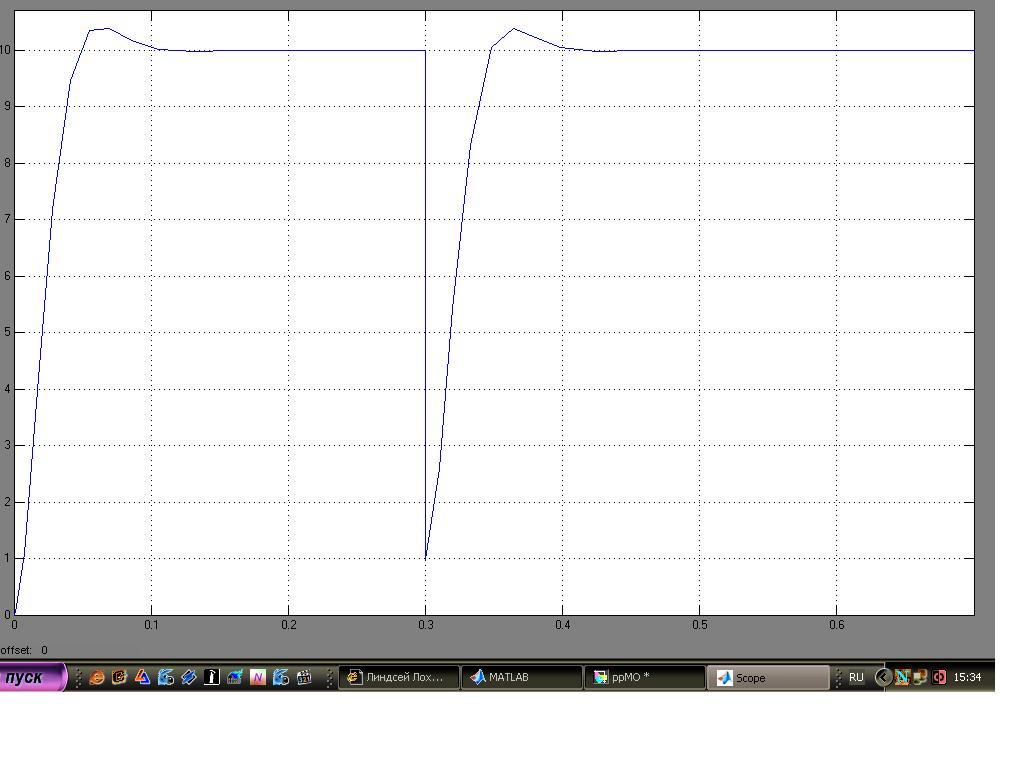
Рисунок 4.1.2 – Графік перехідних процесів при налаштуванні внутрішнього контуру на МО.
4.2 Моделювання САР в Matlab до розділу 3.5
Введемо розраховані регулятори в САУ та промоделюємо систему в Matlab (рис. 4.2.1).
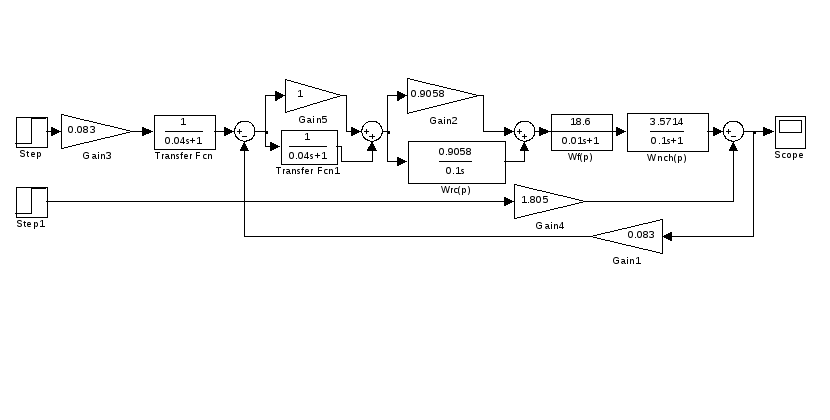
Рисунок 4.2.1 – Модель внутрішнього контуру САР, настроєного на СО
Графік періхідного процесу має вигляд:
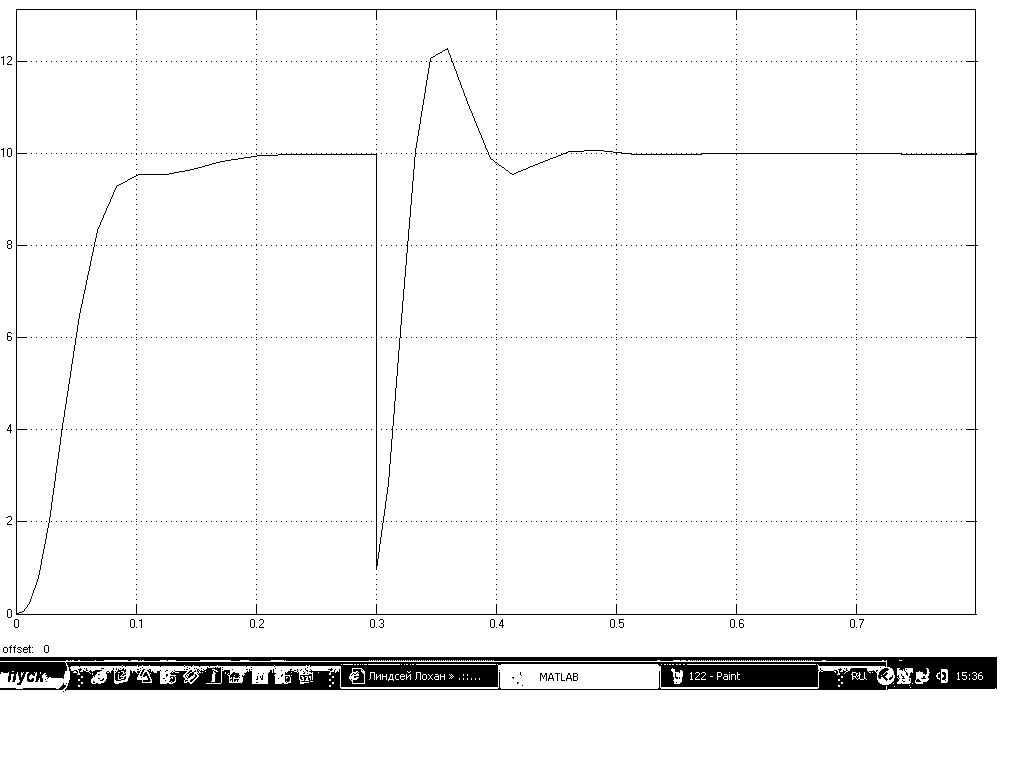
Рисунок 4.2.2 – Графік перехідних процесів при налаштуванні внутрішнього контуру на СО.
4.3 Моделювання САР в Matlab до розділу 3.6
Введемо розраховані регулятори в САУ та промоделюємо систему в Matlab (рис. 4.3.1).
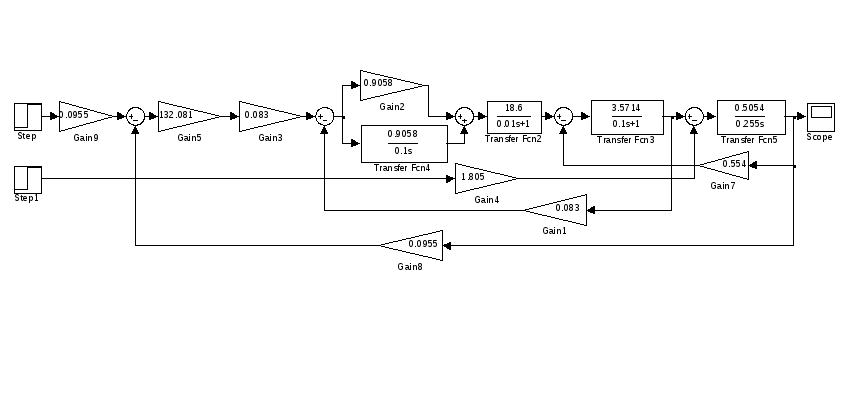
Рисунок 4.3.1 – Модель зовнішнього контуру САР, настроєного на МО
Графік періхідного процесу має вигляд:
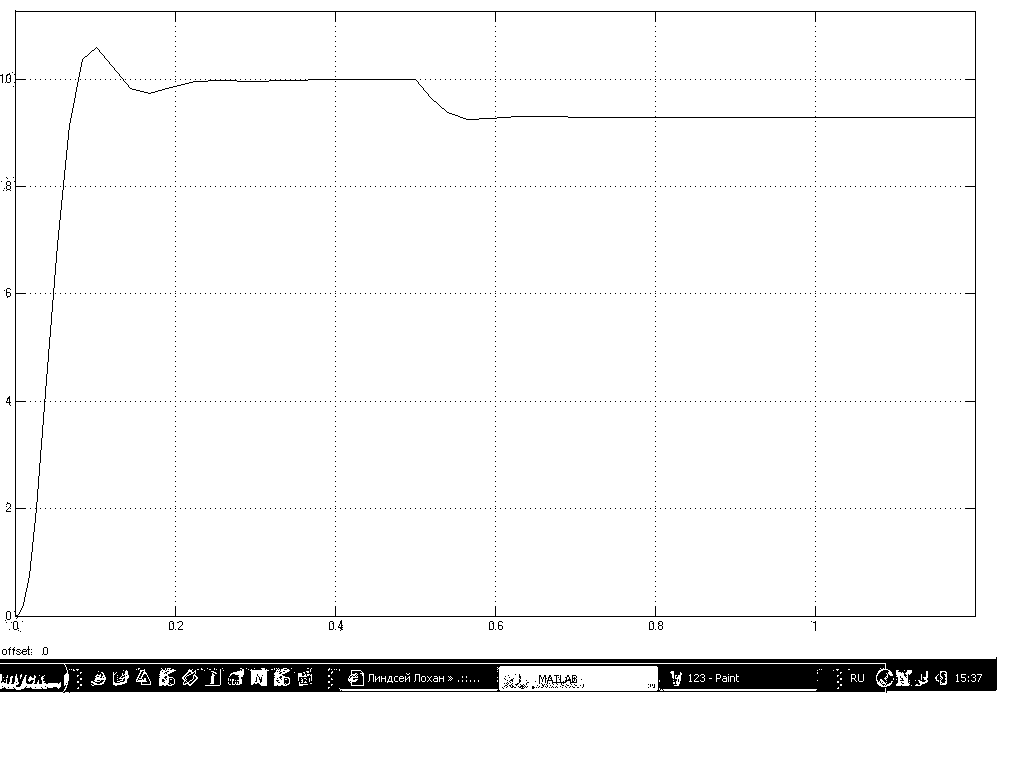
Рисунок 4.3.2 – Графік перехідних процесів при налаштуванні зовнішнього контуру на МО.
4.4 Моделювання САР в Matlab до розділу 3.7
Введемо розраховані регулятори в САУ та промоделюємо систему в Matlab (рис. 4.4.1).
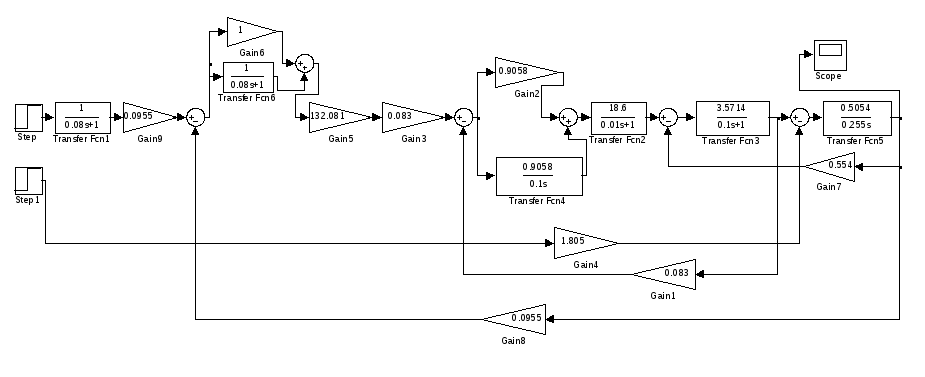
Рисунок 4.4.1 – Модель зовнішнього контуру САР, настроєного на СО
Графік періхідного процесу має вигляд:

Рисунок 4.4.2 – Графік перехідних процесів при налаштуванні зовнішнього контуру на СО.
ВИСНОВОК
Перед виконанням курсової роботи було повторино такий теоретичний матеріал: передатна функція та її застосування, системи підпорядкованого управління, настроювання систем управління на модульний (технічний) та симетричний оптимум, типові алгоритми управління САУ та електронні регулятори, прямі показники якості та точності САУ, принципи моделювання САУ в програмній середі MATLAB.
Курсова робота виконувалась індивідуально, відповідно до номера варіанта, що був виданий викладачем. Що дало змогу закріпити вище сказаний матеріал.