

Определение устойчивости по критерию Гурвица:
Из характеристического уравнения имеем
а0=2, а1=65, а2=425, а3=1250, а4=5568,75
А1 = а1 = 65


 –главный
определитель Гурвица
–главный
определитель Гурвица
a0=2,
![]() 65,
65,![]() 25130,
25130,![]() 7878000,
7878000,![]() 43870000000
43870000000
Определители Гурвица низшего порядка имеют тот же знак, что и a0, следовательно, система устойчива.
Определение устойчивости по критерию Михайлова:
D(p)=
![]() =0
– характеристическое уравнение системы
=0
– характеристическое уравнение системы
Подставляем p=j и находим вещественную и мнимую функции Михайлова:
X()=24–4252+5568,75=0
Y()=(–652+1250)=0
Корни уравнения Y()=0 1=0, 2=4,385
Корни уравнения X(ω)=0 ω1=14,03 ω2=198,47
 а)
б)
а)
б)
Рис.4 - Годограф Михайлова.
Согласно
критерию Михайлова , для устойчивости
системы автоматического регулирования
необходимо и достаточно, чтобы годограф
характеристического вектора D(p),
где
![]() ,
начинаясь при
,
начинаясь при![]() на действительной оси, с ростом
на действительной оси, с ростом![]() от
от![]() обходил последовательно, следуя против
часовой стрелки, 4 квадранта, нигде не
обращаясь в ноль.
обходил последовательно, следуя против
часовой стрелки, 4 квадранта, нигде не
обращаясь в ноль.
Кривая проходит через четыре квадранта, и при этом вектор D(p) нигде не обращается в ноль, значит система устойчива.
Определение устойчивости по критерию Найквиста:

![]() –передаточная
функция разомкнутой цепи
–передаточная
функция разомкнутой цепи
Заменив p на j, получаем
![]()
откуда

Рис.5 – АФЧХ разомкнутой системы
По
критерию Найквиста, для устойчивости
замкнутой системы автоматического
регулирования необходимо и достаточно,
чтобы частотный годограф комплексного
коэффициента передачи разомкнутой
системы
![]() при изменении
при изменении![]() от
от![]() не охватывал точку (-1;j0).
не охватывал точку (-1;j0).
Построив годограф, мы видим, что он не огибает точку (–1; j0), следовательно, по критерию Найквиста система устойчива.
Запасы устойчивости по амплитуде и по фазе.

Рис.6 - АФЧХ разомкнутой системы
 Запас
устойчивости по амплитуде 0.25( отрезок,
заключенный между точкой (–1; j0)
Запас
устойчивости по амплитуде 0.25( отрезок,
заключенный между точкой (–1; j0)
запас
по устойчивости по фазе
![]() =22.72
=22.72
ЛАХ разомкнутой исходной системы, желаемая ЛАХ,
ЛАХ и передаточная функция корректирующего устройства.
Wраз(p)=
![]() , откуда
, откуда
T1=0.2, T2=0.04
1=![]() 5
2=
5
2=![]() 25
25
lg1=0.69 lg2=1.39
K1=![]() 33,3
33,3
![]() ,
(10)
,
(10)
![]() .
(11)
.
(11)
Первая низкочастотная асимптота до частоты 2 имеет наклон –20 дБ/дек, от 2 до 3 наклон –40 дБ/дек, от 3–60 дБ/дек.
Графики ЛАЧХ и ЛФЧХ даны в приложении.
Построение желаемой лачх с учетом требуемых значений быстродействия, перерегулирования и точности.
 Построение
желаемой ЛАЧХ производится из следующих
условий быстродействия, перерегулирования
и точности: σ=20%, tр=2
c.
Построение
желаемой ЛАЧХ производится из следующих
условий быстродействия, перерегулирования
и точности: σ=20%, tр=2
c.

Требуемое
значение запаса по модулю![]() дБ и запаса по фазе
дБ и запаса по фазе![]() .
.
Из
полученных условий строим желаемую
ЛАЧХ. Отметим точку
![]() и проведем через нее прямую с наклоном
–20дБ/дек, которая представляет собой
среднечастотную
амплитуду желаемой ЛАЧХ. Продолжим
прямую до тех пор, пока ординаты не
станут равными L1
и L2.
Этим точкам соответствуют частоты
и проведем через нее прямую с наклоном
–20дБ/дек, которая представляет собой
среднечастотную
амплитуду желаемой ЛАЧХ. Продолжим
прямую до тех пор, пока ординаты не
станут равными L1
и L2.
Этим точкам соответствуют частоты
![]() и
и![]() :
:![]() ,
,![]() .
Из этих данных определяем
.
Из этих данных определяем![]() ,
,![]() .
Низкочастотная область желаемой ЛАЧХ
совпадает с исходной ЛАЧХ:
.
Низкочастотная область желаемой ЛАЧХ
совпадает с исходной ЛАЧХ:![]() .
.
Высокочастотную
область проводят так, чтобы через каждую
0,2 дек ломать на 20 дБ/дек, чтобы наклон
желаемой ЛАЧХ в конце совпало с исходной
ЛАЧХ:
![]() Она представлена в приложении.
Она представлена в приложении.
Составим передаточную функцию разомкнутой системы для желаемой САУ, получим:
![]()
![]() .
(11)
.
(11)
После этого построим ЛФХ желаемой системы (см. приложение) и определим запасы устойчивости по амплитуде и по фазе, и сравним их с запасами устойчивости, полученными из номограммы.
![]()
![]() ,
,
![]()
Запас
по фазе
![]() ,
запас устойчивости по амплитуде равен
,
запас устойчивости по амплитуде равен![]() .
Требуемые запасы выполняются.
.
Требуемые запасы выполняются.
График желаемой ЛАЧХ представлен в приложении.
 Построение
ЛАЧХ корректирующего устройства,
нахождение его передаточной функции,
расчет параметров.
Построение
ЛАЧХ корректирующего устройства,
нахождение его передаточной функции,
расчет параметров.
Выбираем последовательное включение корректирующего устройства в прямую цепочку САУ.

Рис.7 - Схема включения корректирующего устройства в исходную систему.
ЛАЧХ корректирующего устройства получается вычитанием ординат Lисх(w) из Lжел(w).
![]()
По графику полученной ЛАЧХ (приложение) находим сопрягающие частоты:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Передаточная функция корректирующего устройства имеет вид:
![]()
![]()
![]()
Корректирующее устройство можно представить в виде последовательных динамических звеньев, разделенных усилителями.
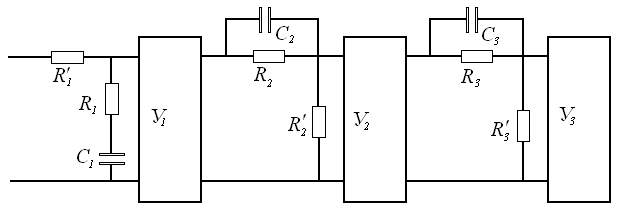
Рис.8 - Схема корректирующего устройства
Рассчитаем параметры каждого звена.
 1
звено – интегрирующее. Его передаточная
функция имеет вид:
1
звено – интегрирующее. Его передаточная
функция имеет вид:
![]()
Так
как ![]()

То ![]() мкФ
мкФ
![]() кОм
кОм
![]() кОм
кОм
2 звено – дифференцирующее. Его передаточная функция имеет вид:
![]()
Так
как ![]()

То ![]() мкФ
мкФ
![]() кОм
кОм
![]() кОм
кОм
Коэффициент
передачи

3 звено также является дифференцирующим. Его передаточная функция имеет вид:
![]()
Параметры находятся аналогично 2 звену.
![]() мкФ
мкФ
![]() кОм
кОм
![]() кОм
кОм
Коэффициент
передачи

Рассчитаем параметры усилителя.
Необходимо, чтобы коэффициент передачи исходной системы сохранялся, поэтому
![]()
Пусть
![]() ,
тогда
,
тогда
![]()
 Передаточная
функция скорректированной системы
находится по формуле
Передаточная
функция скорректированной системы
находится по формуле
![]()
Тогда
![]()
Статическая, скоростная и по ускорению ошибки исходной и скорректированной систем. Запасы устойчивости по амплитуде и фазе.
Статическая, скоростная и по ускорению ошибки.
Передаточная функция ошибки замкнутой системы вычисляется по формуле:
![]()
Тогда для исходной системы
Wисх(p)
=![]()
![]()
![]()
 Статическая
ошибка:
Статическая
ошибка:
![]()
Скоростная ошибка:
![]()
Ошибка по ускорению:
![]()
Для скорректированной системы
![]()
![]()
Статическая ошибка:
![]()
Скоростная ошибка:
![]()
Ошибка по ускорению:
![]()
Для скорректированной системы коэффициенты ошибок значительно меньше, чем для исходной.