

Министерство образования Российской Федерации
Южно-Уральский государственный университет
Кафедра «Гидравлика и гидропневмосистемы»
Пояснительная записка
к курсовому проекту
«Электрогидравлический привод перемещения рабочего органа манипулятора»
Челябинск 2009
Содержание
АННОТАЦИЯ ………………………………………..…………………………………….....2
1 ОПИСАНИЕ ПРИВОДА………………………………………………….........................3
2 ПОСТРОЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ СИСТЕМЫ…..…………….............5
3 ОПРЕДЕЛЕНИЕ ПОТРЕБНОЙ МОЩНОСТИ ПРИВОДА…….................................6
4 СОСТАВЛЕНИЕ УРАВНЕНИЙ ЭЛЕМЕНТОВ ГИДРОСИСТЕМЫ, ОПРЕДЕЛЕНИЕ ЧИСЛЕННЫХ КОЭФФИЦИЕНТОВ, НАХОЖДЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ...........9
4.1 Электромеханический преобразователь……………………………………………9
4.2 Гидроусилитель сопло-заслонка с пружинной синхронной связью……….......10
4.3 Гидроцилиндр…………….........…………….........…………….........………............14
4.4 Передаточная функция потенциометра…………….........…………….........…....16
4.5 Передаточная функция ИДПЗ…………….........…………….........………………..16
4.6 Передаточная функция электронного блока…………….........…………….........16
5 ПЕРЕДАТОЧНАЯ ФУНКЦИЯ РАЗОМКНУТОЙ СИСТЕМЫ…………….........…….17
6 ПЕРЕХОДНЫЙ ПРОЦЕСС ЗАМКНУТОЙ СИСТЕМЫ…………….........…………..21
7 КОРРЕКЦИЯ СИСТЕМЫ…………….........…………….........…………….........…….24
7.1 Построение желаемой ЛАЧХ…………….........…………….........……………........24
7.2 Выбор корректирующего устройства…………….........…………….........………..26
8 ЗАКЛЮЧЕНИЕ…………….........…………….........…………….........…………...........30
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ…………….........…………….........….....31
Аннотация
|
|
ХХХХХХХХХ Х.Х. Электрогидравлический привод перемещения рабочего органа манипулятора. Челябинск: ЮУрГУ, АК, 2009, 31 с., илл. 17, табл. 1. Библиография литературы - 10 наименований. |
В курсовом проекте рассмотрено проектирование электрогидравлического рулевого привод самолета, подробно описан расчет составных элементов системы.
Графическая часть курсового проекта включает показатели основных характеристик системы, график функции переходного процесса.
1 Описание привода
Управление современным самолётом без систем автоматического регулирования невозможно. Благодаря своим массогабаритным показателям, точности, быстродействию широко применяется в самолётах электрогидравлические следящие системы.
На рис. 1 приведена схема электрогидравлического следящего привода. Здесь управление перемещением штока цилиндра, а, следовательно и рулевой плоскостью РП осуществляется электрогидравлическим усилителем ЭГУ, который состоит из электромеханического преобразователя ЭМП, гидроусилителя сопло-заслонка и четырехщелевого золотника с электрической обратной связью по положению золотника. Отчёт перемещения выходного штока исполнительного гидроцилиндра осуществляется, с помощью потенциометра П. Электрический сигнал на ЭМП поступает с электронного блока ЭБ.
В
ЭБ поступает входной электрический
сигнал
![]() ,
сигнал о положении штока гидроцилиндра
с потенциометра П и сигнал о положении
золотника с индуктивного датчика
положения золотника ИДПЗ. В ЭБ вычисляется
сигнал ошибки, который преобразуется
в соответствии с алгоритмом коррекции
и усиливается до необходимой величины,
потребной для управления ЭМП.
,
сигнал о положении штока гидроцилиндра
с потенциометра П и сигнал о положении
золотника с индуктивного датчика
положения золотника ИДПЗ. В ЭБ вычисляется
сигнал ошибки, который преобразуется
в соответствии с алгоритмом коррекции
и усиливается до необходимой величины,
потребной для управления ЭМП.
Исходные численные данные приведены в табл. 1.
Табл. 1 – Исходные данные
|
Параметры системы |
Данные для синтеза |
| ||||||||||
|
|
|
|
|
|
Р, МПа |
ЭМП |
С |
|
|
| ||
|
|
|
| ||||||||||
|
800 |
20 |
120 |
300 |
30 |
11 |
0,015 |
|
0,4 |
0,4 |
25 |
8 |
10 |
![]() –масса
подвижных частей штока;
–масса
подвижных частей штока;
![]() –перемещение
штока;
–перемещение
штока;
![]() –скорость
штока;
–скорость
штока;
![]() –ускорение
штока;
–ускорение
штока;
![]() –давление
в гидросистеме;
–давление
в гидросистеме;
![]() –время
переходного процесса;
–время
переходного процесса;
![]() –величина
перерегулирования;
–величина
перерегулирования;
![]() –электрический
входной сигнал привода;
–электрический
входной сигнал привода;
![]() –коэффициент
передачи ЭМП;
–коэффициент
передачи ЭМП;
![]() –постоянная
времени ЭМП;
–постоянная
времени ЭМП;
![]() –коэффициент
демпфирования;
–коэффициент
демпфирования;
![]() –относительная
ошибка регулирования в приводе;
–относительная
ошибка регулирования в приводе;
![]() –коэффициент
позиционной нагрузки.
–коэффициент
позиционной нагрузки.
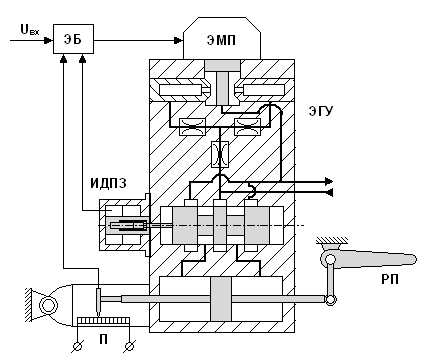
Рис. 1 – Электрогидравлический рулевой привод самолёта