

3 Расчет нелинейной сау
3.1 Преобразование структурной схемы
Структурная схема СУ с нелинейным элементом.

Рисунок 9 - Структурная схема СУ с нелинейным элементом
Нелинейный элемент представляет собой реле с гистерезисом.

Рисунок 10 - Статическая характеристика реле с гистерезисом.
Преобразуем структурную схему.
Перенесем ПУ через сумматор.

Рисунок 11 - Структурная схема СУ с нелинейным элементом после пер-
вого преобразования
Преобразуем схему.
W1 (p) = 1/Wпу (p)*Wк2 (p)
![]()
W2 (p) = Wпу (p)*Wб (p)
![]()
W1 (p)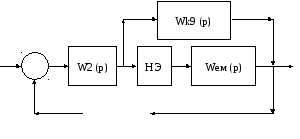
Рисунок 12 - Структурная схема СУ с нелинейным элементом после вто-
рого преобразования
Размыкаем структурную схему перед нелинейным элементом.
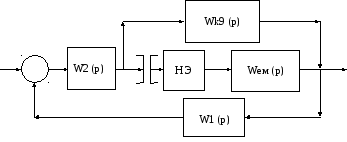
Рисунок 13. Структурная схема СУ с размыканием перед нелинейным
элементом
Н Э
W1 (p)
W2 (p)
Wем (р)




Рисунок 14 - Структурная схема СУ с нелинейным элементом после раз-
мыкания и преобразования
Преобразуем схему.
W3 (p) = W1 (p)*W2 (p)/Wк9 (p)


Рисунок 15 - Структурная схема СУ с нелинейным элементом после сле-
дующего преобразования
Преобразуем схему.
W4 (p) = Wем (p)*W3 (p)


Рисунок 16 - Структурная схема СУ с нелинейным элементом после всех
преобразований
Получаем передаточную функцию СУ с нелинейным элементом.
W4 (p) = 0.25/1.728p3 + 4.5p2 + 3.9p + 1.125
3.2 Построение фазового портрета
Структурная схема СУ с нелинейным элементом

Рисунок 17 - Структурная схема СУ с нелинейным элементом
Передаточная функция СУ определяется следующей формулой
W4 (p) = y (t)/g (t) = 0.25/4.5p2 + 3.9p + 1.125
Преобразовываем предыдущее выражение.
(4.5p2 + 3.9p + 1.125)*y (t) = 0.25*g (t)
4.5p2*y (t) +3.9p*y (t) +1.125*y (t) = 0.25*g (t)
Уравнение нелинейного элемента.
g (t) = F [ε (t)]
Уравнение сравнивающего элемента
ε (t) = x (t) – y (t)
Предположим, что задающее воздействие х (t) = 0.
Тогда уравнение нелинейной системы будет иметь следующий вид:
4.5p2*y (t) + 3.9p*y (t) +1.125*y (t) = -0.25*F[y (t)]
Составим систему уравнений.
Подставим значения y (t).
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) = -0.25*(-1/2)
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) = -0.25*(1/2)
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) = -0.25*(1/2)
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) = -0.25*(-1/2)
Получаем следующую систему уравнений.
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) – 0.125 = 0
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) + 0.125 = 0
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) + 0.125 = 0
4.5* p2*y (t) + 3.9* p*y (t) + 1.125*y (t) – 0.125 = 0
Сделаем замену и разделим все члены уравнения на 4.5.
y2 = p2*y (t)
y1 = p*y (t)
y0 = y (t)
Получим следующую систему уравнений.
y2 = -0.87*y1 – 0.25*yo – 0.125 при X < 1/2 Х > 0
y2 = -0.87*y1 – 0.25*yo + 0.125 при X > 1/2
y2 = -0.87*y1 – 0.25*yo + 0.125 при X > -1/2 Х < 0
y2 = -0.87*y1 – 0.25*yo – 0.125 при X < -1/2
Получим систему уравнений для участков (-∞;1/2), (1/2; ∞), (-1/2; ∞),
(-∞; 1/2).
Создадим матрицу для решения дифференциального уравнения.
Зададим матрицу начальных условий.


Примем количество точек, равное 1000 и конечное время интегрирования 100 с..
В результате матрица решений примет вид.
![]()
![]()

Рисунок 18 - Фазовый портрет СУ с нелинейным элементом

Рисунок 19 - Переходный процесс СУ с нелинейным элементом